隨著汽車電動化、智能化技術應用的不斷深入,車輛動態行駛下的潛能正在被得到釋放。為此在車輛動力和車身控制方面,也在不斷涌現出更多的功能要求。配合當前行業的高度競爭,整車企業期望通過更多的車輛配置來提升競爭力,以贏得銷量。
車輛配置增加意味著車輛控制需求也同步在增加,如果按照以往單純的通過疊加控制器的方式來實現多功能控制的話,一方面會使得線束變得更加繁瑣和錯綜復雜,同時也會增加硬件的成本,不利于在當前情況下達到降本的目的。
針對上述挑戰,麥格納新一期“黑科技來了”系列技術分享中,麥格納動力總成軟件工程經理何松和麥格納動力總成產品線管理高級專家馮永升共同帶來了如何在軟件定義汽車的技術框架下,通過能量與運動控制軟件來提高整車駕駛性能,同時做到硬件成本可控。

軟件差異化去破解硬件同質化的難題
當下汽車“卷”的原因一方面來源于價格端的壓力,另一方面則來源于硬件的同質化。并且隨著供應鏈信息愈發的透明,硬件同質化的現象長期來看也得不到解決。
在此背景下,軟件能力成為差異化競爭的重中之重。何松列舉了兩個軟件提升整車體驗的案例。一是扭矩矢量控制,二是主動側滑角限制控制。
在扭矩矢量控制功能中,典型的工況是在低附著力路面或者高附著力路面下車輛過彎時的姿態控制。
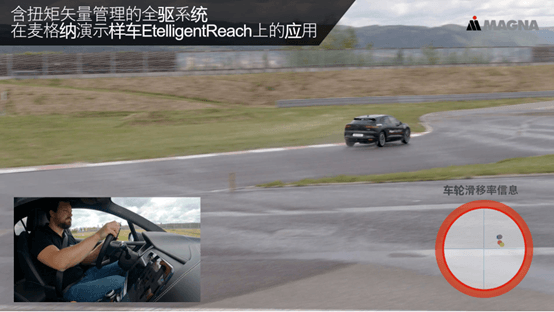
當車輛在上述路況行駛時,如果駕駛員對速度把握不準,極易發生甩尾甚至失控,即使是搭載四驅功能的車輛也對駕駛員的操控技術要求極高。而同樣是四驅的車輛,搭載麥格納車輛運動控制軟件后,即使是新手司機也可以平穩地通過。
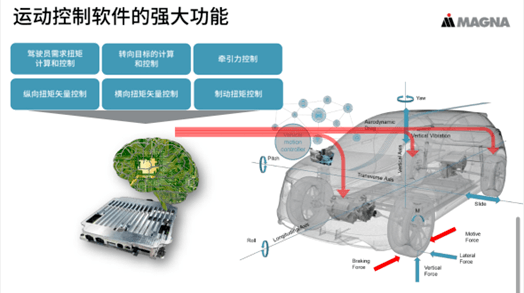
其控制邏輯為,當車輛過彎轉向時,通過麥格納扭矩控制功能,額外增加對驅動電機和制動系統的控制,而不是像往常一樣僅僅依靠轉向來過彎。在轉彎過程中,系統首先計算和處理駕駛員的需求扭矩以及方向盤的轉向需求,然后結合驅動電機和制動系統通過橫向和縱向的扭矩矢量控制,來處理各車輪打滑的情況,以不斷分配調整四個車輪的扭矩值,保證車輛過彎時的姿態控制。
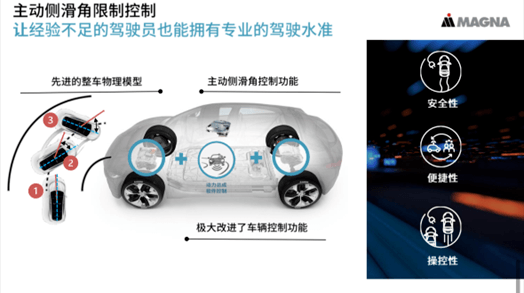
另外一個功能便是主動側滑角限制控制。降低車輛行駛過程中的側滑角有助于提升輪胎橫向摩擦能力,以便更好地控制整車姿態,進而降低車輛駕駛難度。
為了實現有效限制,需要實時監控整車的限滑角數值。常見的監控方式為采用慣性測量裝置,如IMU檢測裝置。但考慮到IMU價格較高,大量搭載勢必會增加成本。麥格納通過實時的計算甚至是預測整車的姿態和關鍵信息,進而在無需增加硬件的強狂下實現對側滑角的控制。同時,基于該控制功能也可以幫助駕駛員做更加激烈的駕駛嘗試,如漂移功能等。
除上述兩種功能外,麥格納運動控制軟件還可通過對兩驅和四驅的動態切換來實現對車輛能量的控制。
在濕滑的山路上正常行駛時,考慮到行駛動力需求以及能耗表現,車輛可以以兩驅的模式行駛。但在彎道出彎處,如果出現了意想不到的結冰路面(低附著力系數),搭載麥格納運動控制軟件的車輛便可以立即啟動全輪驅動,并結合車輛姿態控制功能來確保車輛平穩通過。該功能可通過與ADAS功能結合,利用圖像手段來提前判斷并觸發。
以上僅僅是麥格納運動控制軟件的一些應用場景介紹,為了測試實車表現,麥格納在其樣車EtelligentReach實現了搭載應用,由麥格納駕駛員Simon進行了完整的實車場景測試。
軟件解耦,跨域融合
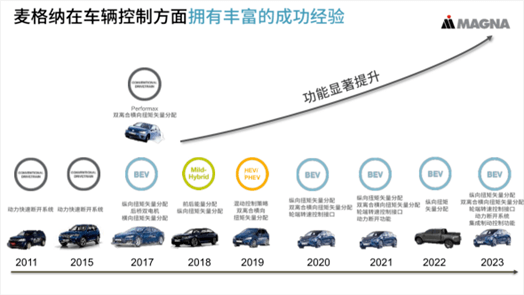
早在2011年麥格納就開始對車輛控制系統的研發。早期以車輛四驅和縱向扭矩控制功能的開發為主,2017年在此基礎上開發了橫向扭矩矢量控制,在之后不斷對功能進行升級,并在電動車型上也實現了應用。
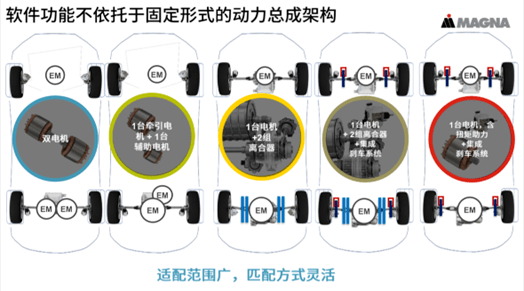
進入軟件定義汽車時代,麥格納推出了SaaP(Software as a Product)概念。通過與SaaP融合,結合電動汽車動力系統的多樣性,麥格納車輛控制軟件不再依托于固定形式的動力總成架構,對多種動力總成架構都能實現很好的適配。
作為麥格納SaaP(Software as a Product)概念的核心,軟件解耦和跨域融合在整個功能的實現過程中扮演著非常重要的作用。基于此,麥格納車輛控制軟件可以在不同的硬件平臺中實現快速部署,不僅可以適配各種動力架構,通過與硬件的解耦,不同的控制器也可實現適配。從而在滿足多種功能的情況下,實現成本可控。
如何實現軟件解耦和跨域融合呢?何松介紹到,以上述場景案例為例,麥格納車輛運動控制軟件只負責處理各種駕駛情況下車輪扭矩的需求值,具體的執行則由對應的執行機構在收到執行信號后再去獨立執行。以車輛漂移為例,在整車層面去計算和處理輪端所需要的扭矩值,結合驅動電機和制動系統的狀態,分別對其進行控制,控制策略完成后,再將控制信號交由其各自執行單元,由執行單元進行最后的控制執行。當然,在控制信號傳導的過程中涉及到多控制器的協同,由于不同的電子電器架構會對具體執行產生影響,因此在開發過程中介入的階段也有所不同。
對于傳統的分布式電子電器架構,受車輛通信標準和線束設計的限制,因此在開發初期就需要介入。而對于集中式的電子電器架構,在開發后期介入也可滿足開發周期要求。
來源:第一電動網
作者:NE時代
本文地址:http://www.155ck.com/kol/224117
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。



先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號