
自動泊車前向車位檢測、更精準的 LCC(車道居中輔助)、ALC(自動變道輔助)以及紅綠燈識別功能……
小鵬 P7 上全新搭載的自動駕駛功能正逐個浮出水面。作為小鵬的第二款量產車,P7 搭載的 XPLIOT 3.0 采用了全新的硬件架構,尤其是在感知層全面自研。
全面自研意味著什么?
在自主研發的車企中,能完全自主建立感知能力的此前只有特斯拉一家。而小鵬汽車要打破 ADAS 巨頭 Mobileye 的壟斷,成為第二家擁有自研感知能力的車企,這個挑戰并不小。
因此,如何向用戶交付更加智能、體驗更好的自動駕駛功能,這也是小鵬汽車研發自動駕駛的核心思考。

打造全閉環自研能力
「以端到端的全閉環自主研發能力提供適應中國路況的自動駕駛解決方案。」這是小鵬汽車在 2019 年 10 月對外提出的理念。
所謂的全閉環自研能力,究竟有哪些?
小鵬汽車也在摸索這個答案的拼圖:從感知、決策和執行等環節入手,對自動駕駛的硬件架構、應用層、交互層等進行全面的重新設計。
小鵬汽車在自研方面進行了大量投入,從車內中控屏、總線到電子電氣架構,再到硬件架構等,內部團隊全部參與了自研設計。
今年一個最明顯的變化是,研發 G3 時自動駕駛感知方案中采用了供應商的方案,但到了 P7 這款車,小鵬開始對車輛的感知系統進行徹底的自研和重構,以達到更精準的目標物感知和更優的數據采集效果。
而在此基礎上,小鵬團隊研發出了不少適合國內路況的本土化自動駕駛輔助功能。
「完全自研」與「中國特色」也因此成為了小鵬自動駕駛技術的關鍵詞。
完全自研的好處不言而喻:一是能夠開發出差異化的功能;二是可以加快功能迭代的速度。
換句話說,將智能化尤其是自動駕駛作為自己最核心的競爭力的小鵬汽車,如果要推動自動駕駛的量產,就必須解決好本土化的適應性問題,并將用戶體驗去推向極致。
前向車位識別功能便是這一思考下的產物。
在 P7 搭載的 XPILOT 3.0 系統上,小鵬自動泊車的前向車位識別是目前業內獨有的功能。
前向車位識別,就是利用側前向攝像頭提前發現前方車位。
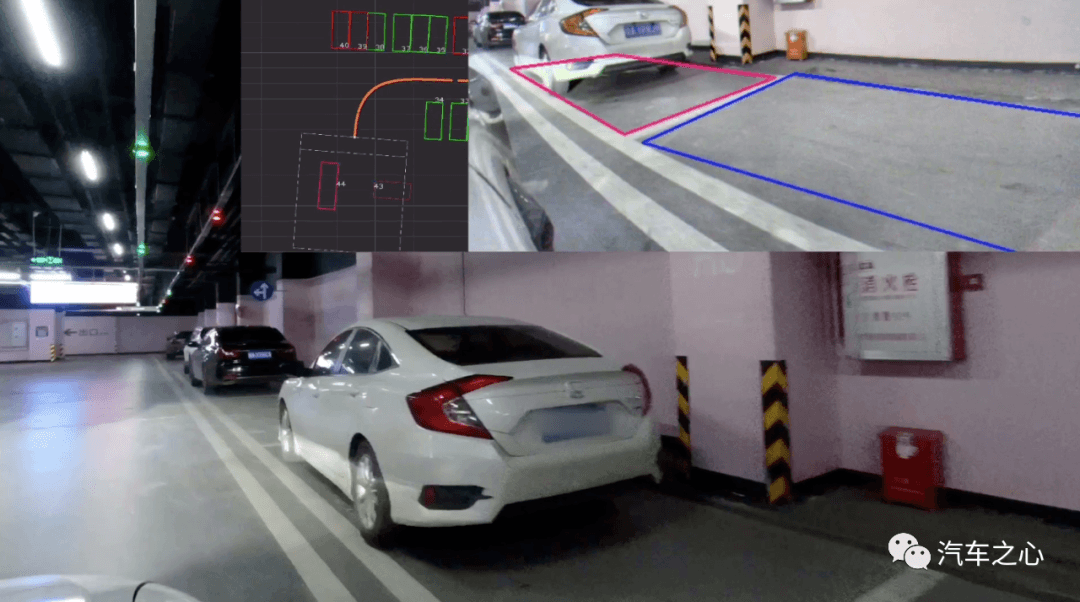
小鵬汽車 CEO 何小鵬曾表示,小鵬希望把自動泊車的使用頻率提高到 70% - 80% 甚至更高。因而團隊投入了大量的研發資源來集中優化自動泊車的體驗,這使得小鵬的自動泊車的使用體驗優于其他同級車型。
在這一背景下,打造完整的自主研發體系必不可少。

號稱業內最強的「XPILOT 3.0 硬件架構」
相比小鵬第一款車型 G3 的硬件配置,在搭載 XPILOT 3.0 的 P7 上用戶很容易感受到團隊的用心。
小鵬 P7 在硬件上進行了新增了這些關鍵部件:
英偉達 Xavier 芯片
新增 4 個毫米波雷達
融合了絕對定位和相對定位的高精度定位、高精地圖
2 側前視攝像頭+2 側后視攝像頭+1 后視攝像頭
這些配置整合在一起是一個什么概念?
在計算平臺上,小鵬選擇了英偉達的 Xavier 芯片,這是國內首次在量產車上使用的車規芯片。
Xavier 芯片有多強悍呢?特斯拉 Autopilot 第二代硬件(即 HW 2.0/2.5)全系搭載的是英偉達 Drive PX2 芯片,而 PX2 的下一個迭代產品就是 Xavier。
Xavier 算力達到 30 Tops,這是業界現在商用最強車載計算平臺。即便是今年 Mobileye 即將量產的 EyeQ5(算力預計可達 24Tops),P7 在算力上還是小勝一籌。
另外,XPilot 3.0 還首發搭載全球頂級汽車供應商博世第五代毫米波雷達。
與第四代雷達相比,第五代雷達的感知性能全面提升:水平視場角從 90° 增大到 120°;點云密度提高了四倍,超過了目前特斯拉 Model 3 上所使用的雷達;同時探測距離、目標物數量和精度也相應增長。
5 個毫米波雷達和 13 個攝像頭的配置,也讓搭載 XPilot 3.0 系統的 P7 完成了全車 360° 無死角覆蓋,從而保證 P7 的智能化功能和全方位感知要求。
感知層的完全自研,以及搭載業界最新的傳感器,用小鵬汽車內部人士的話說,XPILOT 3.0 架構在 2020 年是業界領先,之后持續保持兩三年內領先也沒有問題,而且這個架構也為后續的演進提供了足夠的支撐和空間。
另外,采用全新硬件架構的 XPILOT 3.0,以計算單元為核心,通過計算單元連接域這兩套硬件架構最大的差別在于是否具備一個中央調度系統。
按照小鵬汽車自動駕駛產品總監黃鑫的解釋,這種做法帶來的好處是,使得這個中央大腦具備很強的擴展性和兼容性。
比如自動駕駛的某些功能在第一年、第二年或許還用不到,但到第三年、第四年時可以進行 OTA 推送來激活這些功能。
以小鵬 XPILOT 3.0 的 NGP(Navigation Guided Pilot)為例,它是小鵬汽車的自動駕駛功能集。
NGP 類似于特斯拉的 NOA(Navigate on Autopilot),囊括了不同場景下的自動駕駛輔助功能。
理論上,NGP 既包括了 LCC、ALC、TJP 等常規的自動駕駛輔助功能,也包括小鵬汽車針對本土化道路打造的差異化功能。

識別紅綠燈
這種架構也決定了,NGP 將是一個不斷進化的產品,搭載 XPILOT 3.0 的 P7 將不斷獲得更多的自動駕駛功能。
實際上,要真正實現體驗更好的 L2+級自動駕駛,基本上都要采用類似 P7 的這種架構。
特斯拉之所以可以持續 OTA,正是得益于架構的靈活性,將大量的系統進行解耦,從而使各個系統變為獨立的可控單元。

小鵬 P7 的功能迭代
有了全新的硬件架構,自主研發能更快地推出差異化的創新功能,那么 P7 的自動駕駛輔助功能與 G3 相比,究竟有了哪些提升?
今年 3 月下旬,小鵬汽車的研發團隊曾駕駛 P7 工程車在莞佛高速上進行過一次測試。

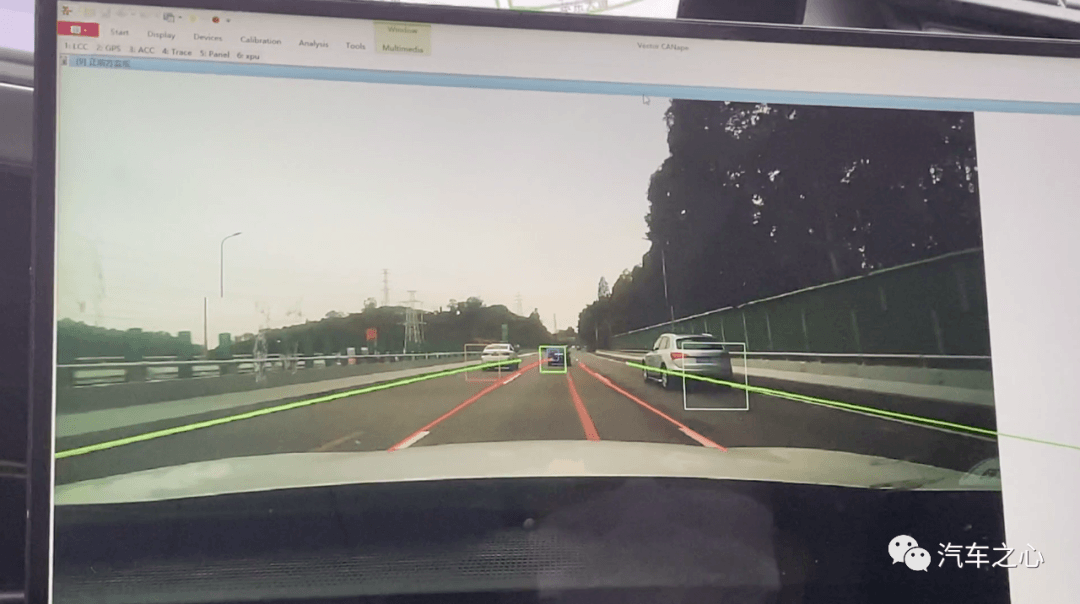
車道線識別
從視頻中看到,在經過南沙收費站附近的一段道路時,出現了殘留車道線與正常車道線疊加、視覺減速線痕跡殘留等復雜路況。不過,P7 在運行 LCC 功能的狀態下順利通過了這一路段,并未受到錯誤車道線的干擾。
常規的車道線檢測做法是,由感知系統對車道線進行識別檢測并作出判斷,這種做法在遇到車道線疊加等復雜情況時便會遇到無法處理的問題。
P7 的策略是,對車道線疊加這類特殊情況進行數據訓練,然后用深度學習的方法讓系統有效地排除干擾。
此外,在 G3 上,原來開啟 ALC 功能時,考慮到安全因素,G3 的打燈變道速度很慢。到了 P7 上,由于硬件感知能力提升,所以用戶使用變道時會感受更暢快。
根據官方透露的消息,更精確的 LCC、ALC 和自動泊車前向車位檢測等功能將會在今年上半年在 P7 上進行開放。
今年下半年,小鵬 P7 的 XPILOT 3.0 系統還會開放 360 度環車身感知系統,并利用 360 度感知能力釋放更有意思的功能。
現在看,P7 重塑硬件架構,相當于夯實了自動駕駛靈活更新的基石。小鵬汽車選擇自研路線,為其車型打造適應國內路況的本土化功能提供了保障。
這也是擅長軟件開發的新造車勢力區別于傳統車企的競爭力所在。
來源:汽車之心
本文地址:http://www.155ck.com/carnews/xinche/114305
以上內容轉載自汽車之心,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號