——本文屬《電車智多星》第6期
在倒車的時候,相信許多人都有發現,在慢慢挪動車子的過程中,在駕駛室內能聽到“滴滴滴”的聲音,以提醒我們快要碰到障礙物或是其他車輛了。
車輛之所以能發出“滴滴滴”的聲音,是汽車上的超聲波雷達在發揮作用。
現在,除了一些老款車型外,很多車型都配備了超聲波雷達。
不過別看超聲波雷達這么常見,很多朋友對這項配置還是不太了解。今天,我們就給大家梳理梳理超聲波雷達的知識點。
什么是超聲波雷達?
超聲波雷達,就是一種利用超聲波測算距離的雷達傳感器裝置。
超聲波雷達也可根據傳感器種類細分為等方性傳感器超聲波雷達和異方性傳感器超聲波雷達,二者的區別在于水平探測角度與垂直探測角度是否相同。
其中等方性傳感器是水平角度與垂直角度相同的傳感器,優點是產生的超聲波波形穩定,缺點是垂直角度過大,容易探測到地面,受照地問題影響較大,且探測距離較近。異方性傳感器是水平角度與垂直角度不同的傳感器,優點是垂直角度小,因而探測距離長,探測范圍大,缺點是產生的超聲波波形不穩定,易產生誤報情況。
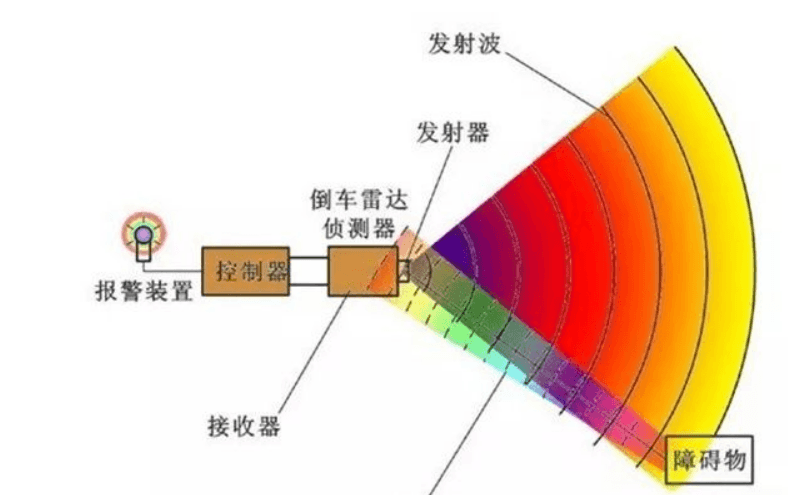
超聲波雷達工作原理是怎樣的?
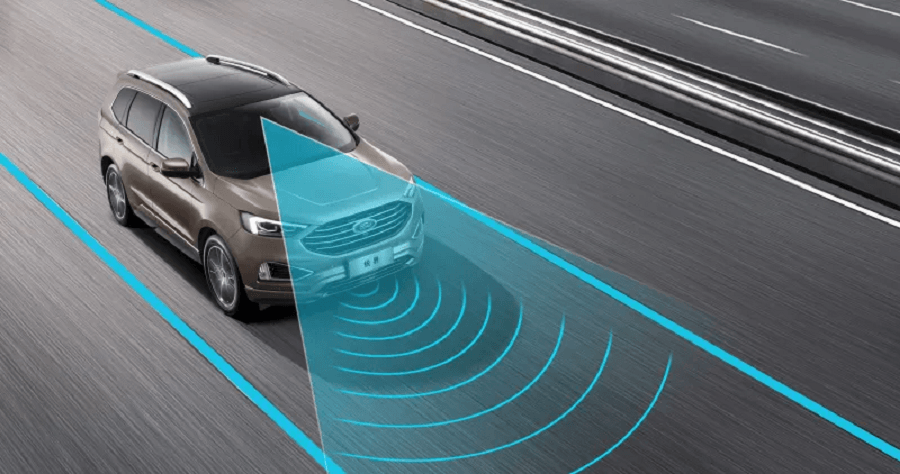
超聲波雷達的工作原理并不復雜:超聲波雷達利用超聲波發射裝置向外發射超聲波(注意,這種超聲波是機械波不是電磁波);發生超聲波后,系統再利用接收器接收返回來的時間差來測算距離。
同時超聲波雷達的探頭一般有40kHz, 48kHz和58kHz三種,一般采用的是40kHz的探頭;另外,超聲波雷達防水、防塵,即使有少量的泥沙遮擋也不影響,并且超聲波雷達的探測范圍在 0.1-3米之間,精度較高,比較適合應用于泊車場景。
超聲波雷達一般布置在汽車上什么位置?
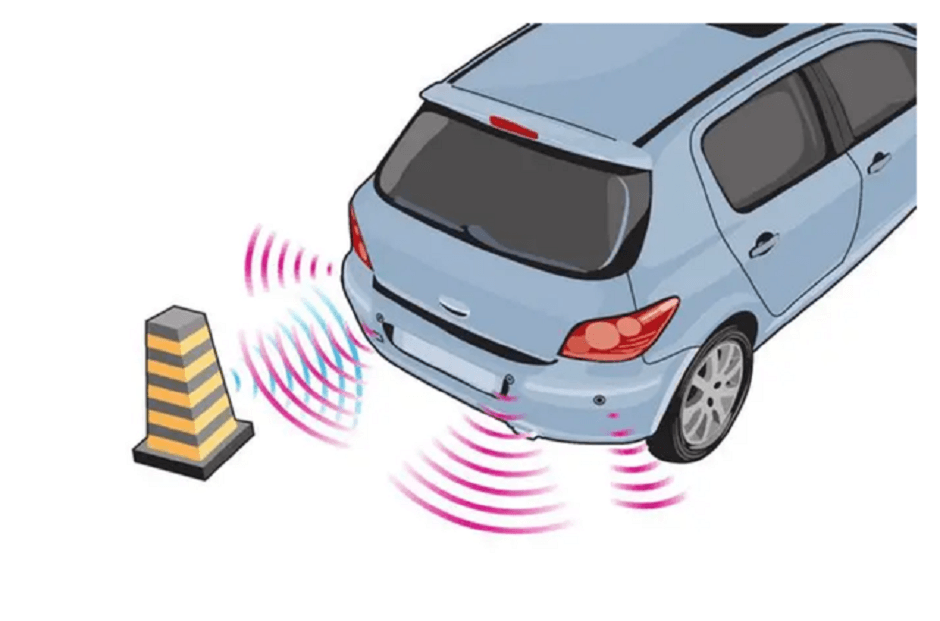
超聲波雷達一般布置在汽車上的兩個位置,第一種是安裝在汽車前后保險杠上的,也就是用于測量汽車前后障礙物的倒車雷達,這種雷達業內稱為UPA;第二種是安裝在汽車側面的,用于測量側方障礙物距離的超聲波雷達,業內稱為APA。
1、UPA超聲波雷達
UPA超聲波雷達主要用于測量汽車前后方的障礙物,探測距離一般在15~250cm之間。
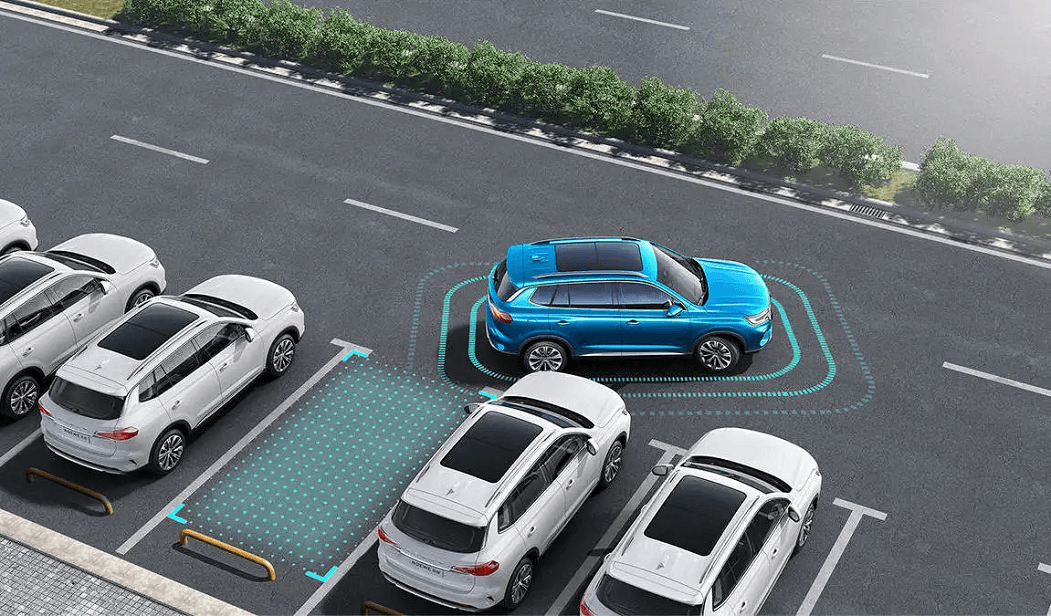
2、APA超聲波雷達
APA超聲波雷達探測距離勝過UPA超聲波雷達,可以達到30~500cm之間,更遠的探測距離讓APA超聲波雷達可以檢測左右側的障礙物,還能根據超聲波雷達返回的數據判斷停車庫位是否存在。但是APA超聲波雷達的功率更大,成本也更高。
超聲波雷達如何應用在智能網聯汽車上?
最后,我們討論下,超聲波雷達如何應用在智能網聯汽車上。
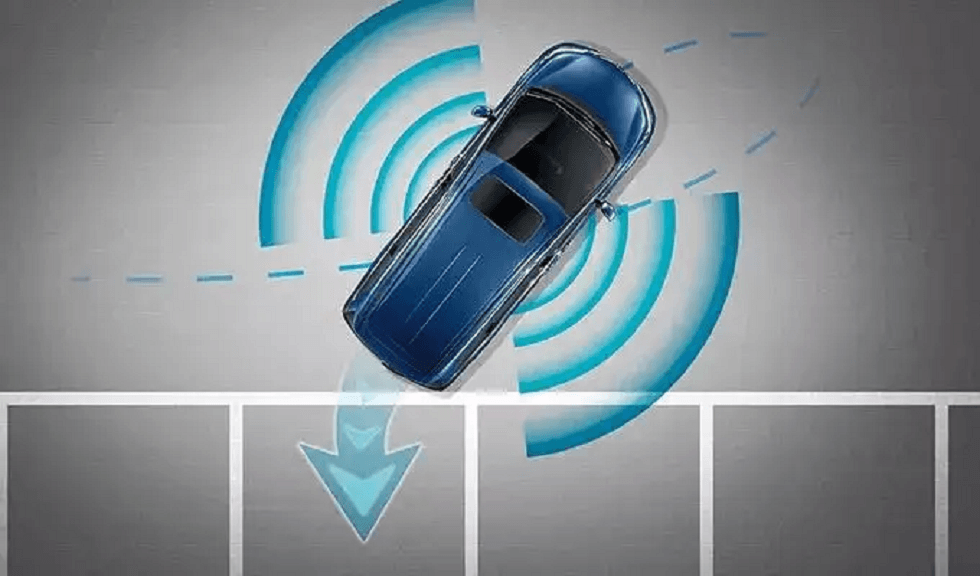
1、自動泊車輔助系統
為了更好地達成輔助停車的功能,部分車型的自動泊車輔助系統甚至包含了8個PDC雷達(用于探測周圍障礙物)和4個PLA雷達(用于測量停車位的長度)。這些超聲波雷達系統可以實時監測車輛與障礙物之間的距離,并把信息反饋給車輛,以幫助車輛及時調整車身姿態和速度,順利完成自動泊車。
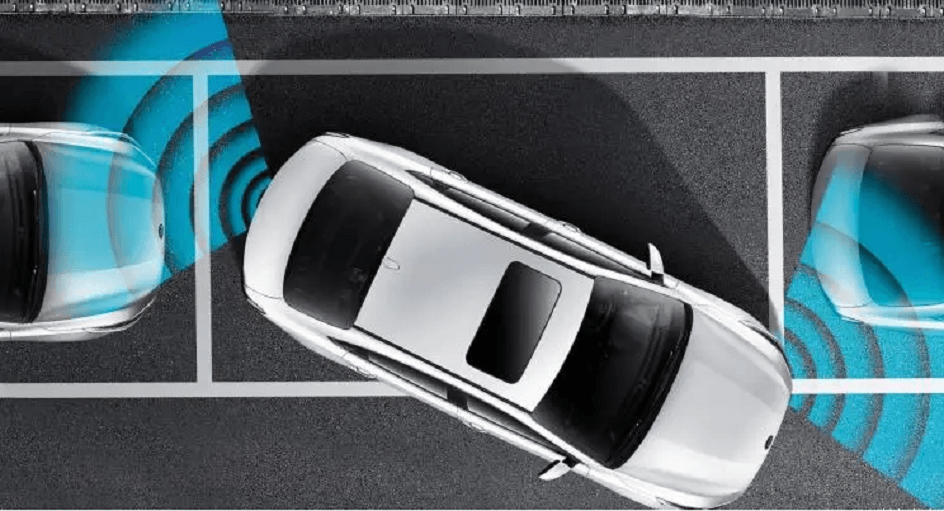
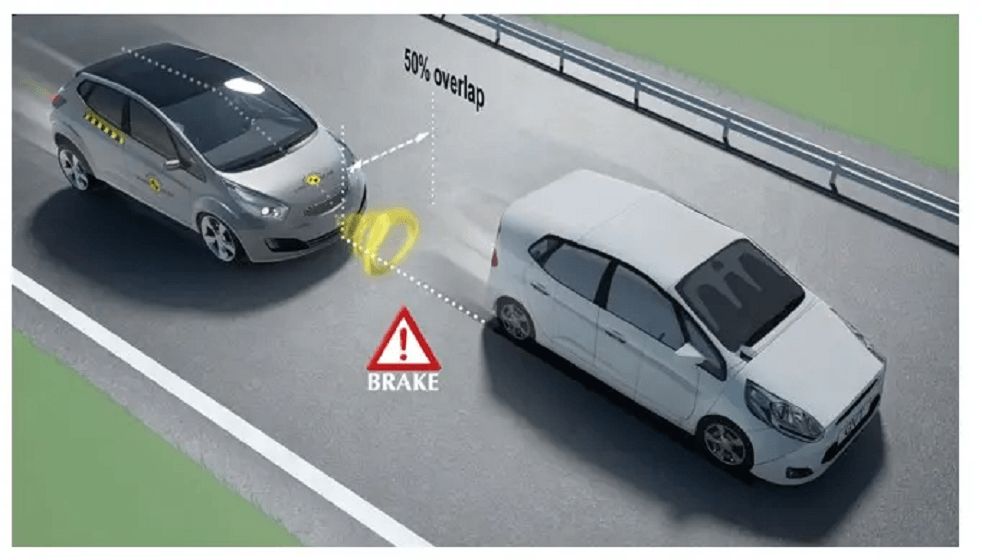
2、自動緊急制動功能
配備了自動緊急制動功能的車輛,會周期性地獲取車輛當前的行駛速度,并根據當前速度、系統中預設的速度閾值以及超聲波雷達的信息反饋,來判斷車輛與障礙物之間的距離。一旦發現車輛距離前方行人或障礙物距離較近的時候,系統會主動提醒駕駛者,如果駕駛者還會做出反應,系統則會主動啟動制動系統,確保安全距離。
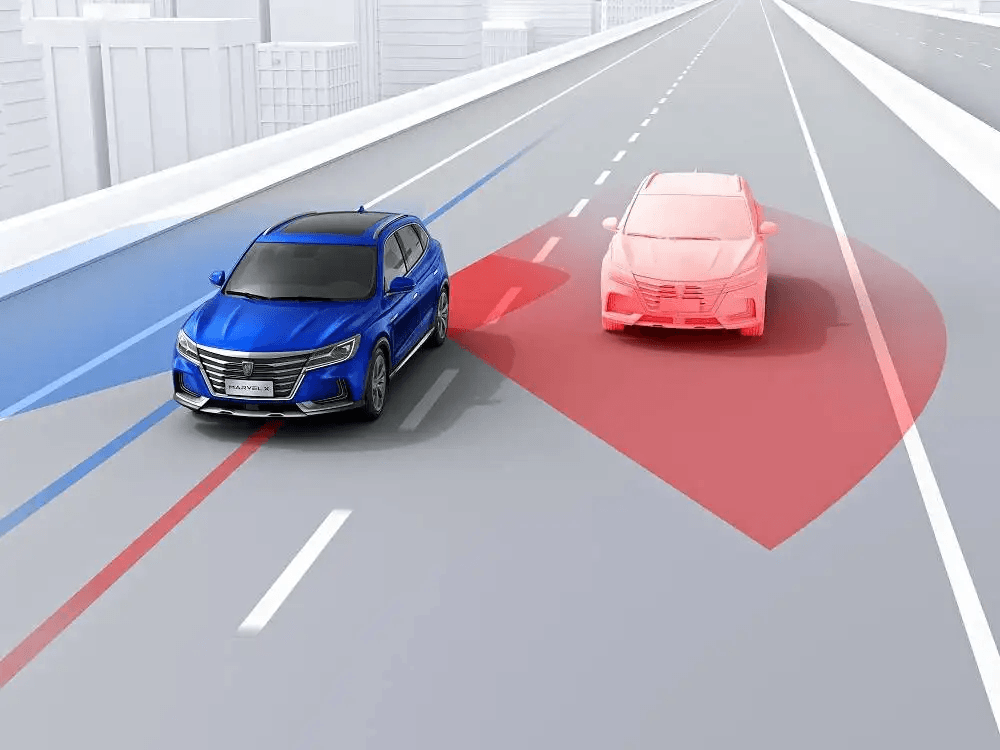
3、前方防碰撞預警功能
前方防碰撞預警功能的工作原理與自動緊急制動功能比較相似,通常會采用超聲波雷達來實現車距的實時監測和識別,通過不斷獲取目標障礙物的距離信息,進行分析處理,傳輸給執行機構。一旦發現存在潛在碰撞危險,便會對駕駛者進行警告,但需要注意的是,預警系統本身不會采取任何制動措施去避免碰撞或控制車輛。
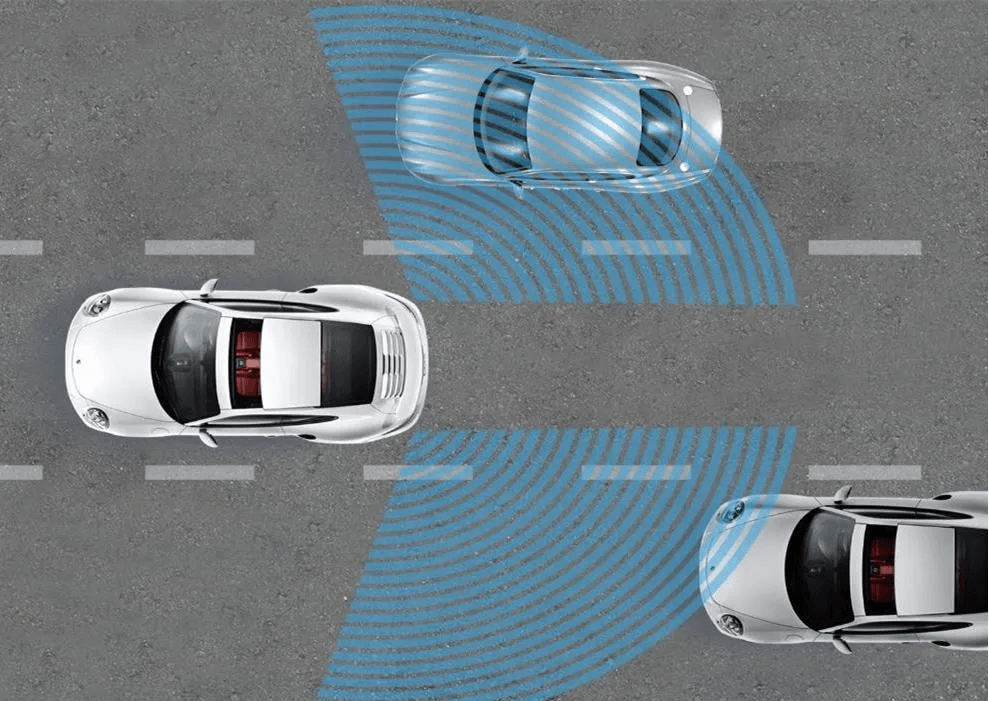
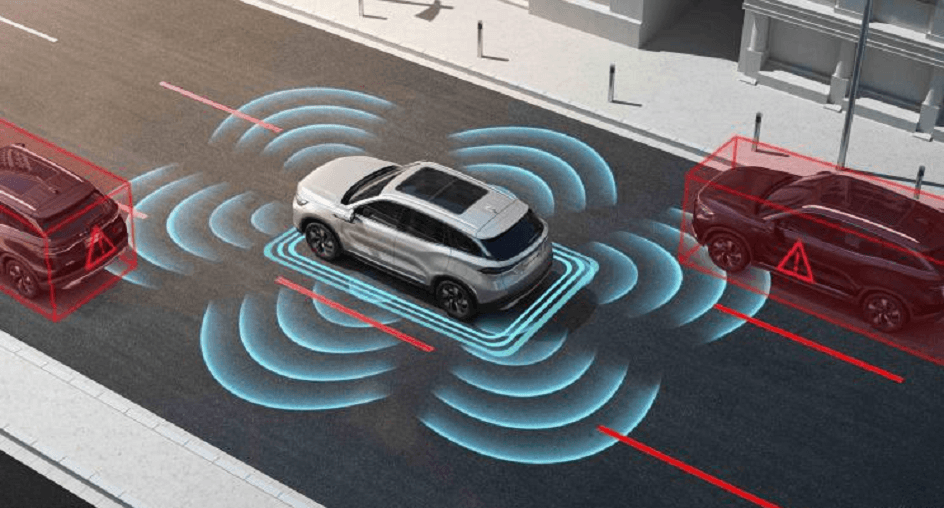
4、變道輔助系統
變道輔助系統可以依靠布置在車身兩側的超聲波雷達組件,探測障礙物或是運動車輛,再結合駕駛者的變道動作,來判斷是否存在碰撞風險;再結合車輛本身的輔助駕駛功能,來完成車輛的變動操作
5、全速自適應續航系統
全速自適應續航系統一般集成了車輛攝像頭、超聲波雷達系統,通過ACC控制單元與ABS系統、發動機控制系統協調動作,適當加速或制動,使得車輛與前方車輛始終保持安全距離。
結束語
汽車工程師們利用超聲波雷達精準的探測距離能力,幫助車輛實現了倒車泊車距離判斷、全速自適應續航系統以及前方防碰撞預警功能等在內的多種功能。而且隨著汽車自動駕駛功能的進一步發展,超聲波雷達的用途和重要性必然會持續擴大。
來源:第一電動網
作者:二師兄玩車
本文地址:http://www.155ck.com/kol/180785
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。


相關話題


先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!













 京公網安備
11010502033163號
京公網安備
11010502033163號