自動駕駛的城市通勤,實際上是一種點對點的領航輔助能力。它是自動駕駛車輛泊出停車場、城市道路領航、泊入停車場的技術集合。
這種能力的背后,首先需要智能駕駛系統處理器的大算力支撐為基礎,還涉及到多傳感器感知通道的信息與算法,高精數據覆蓋、SLAM 即時構圖與定位等技術,讓車輛形成對于道路態勢的「記憶」與整體認知。
這種點到點的領航能力將大幅提升自動駕駛的智能化水平,被視為「行泊一體」發展的技術基礎,其在自動駕駛車輛中的落地成為了產業發展的焦點之一。
2022 年 5 月,智能駕駛芯片公司地平線與自動駕駛解決方案供應商覺非科技正式成為生態戰略合作伙伴,雙方通過車規級 AI 芯片與多傳感器融合算法能力的結合,共同布局自動駕駛量產方案的落地。
近期,此次生態戰略合作在技術上進行了再次升級。
在此前融合定位算法與地平線征程 3 的適配部署與精度驗證后,雙方進一步完成了點云感知、車端自動建圖與定位能力和地平線征程 5 的結合,這也讓覺非科技成為了首個將融合定位算法適配部署于征程 5 的軟件供應商。
此次升級后的技術能力,為芯片產品與自動駕駛解決方案在高階自動駕駛上的應用,提供了必要的技術基礎與儲備。
01、城市通勤融合定位量產解決方案
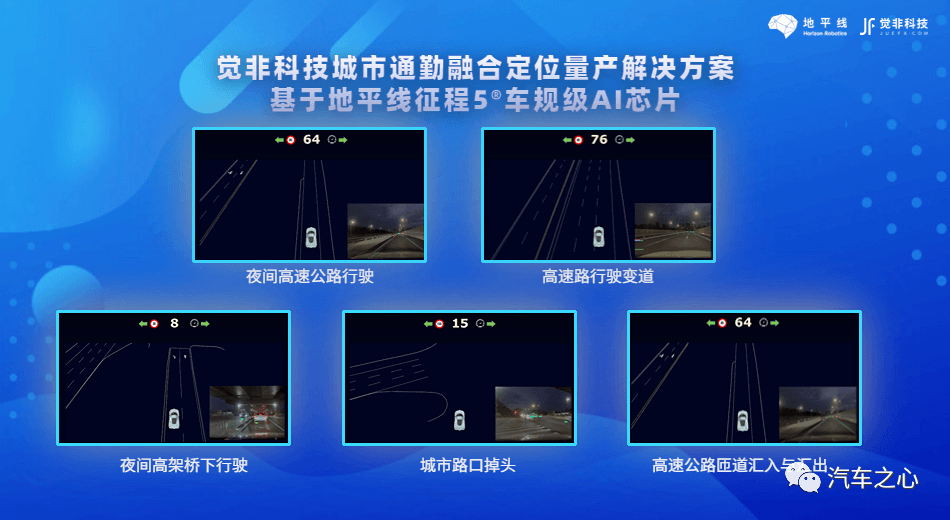
基于地平線征程 5 的高性能與大算力,覺非科技同時發布了城市通勤融合定位量產解決方案。
方案中,覺非將核心技術「融合計算」與「地圖空間數據」進行結合,實現了車輛自定位與實時建圖的技術突破。
覺非科技融合定位運行在地平線征程 5
通過在「記憶泊車」與「城市道路領航」中的融合定位能力,形成了城市通勤中點對點的自動駕駛能力,并可應用于自動駕駛的決策與規劃,助力自動駕駛行泊一體功能快速落地。
02、點云技術突破 引領「記憶泊車 2.0」
在 AVP 解決方案中,傳統采用視覺 SLAM 的方式在對特征點的采集與識別上面臨諸多難點。
例如描述子的特異性差或更換觀察視角時出現完全不同的特征點。在泊車時,車輛角度不穩定也會對特征點的識別造成不利。
為了攻克這些難題,覺非科技在方案中,采用車規級別的量產車固態激光雷達,通過車端實時生成途經區域的點云圖,結合地平線征程 5 的深度學習能力,構建車輛 LiDAR 定位依賴的點云特征圖,供后續記憶泊車使用。
不僅如此,覺非在定位上整合了多種異構點云匹配算法,可以根據所處場景靈活切換,以更低的算力達到更優的效果。
同時,這套記憶泊車解決方案支持跨停車層,可靠性更強,可面向更大范圍的停車場自主規劃迭代升級。
03、可靈活應對復雜場景的融合定位能力
在地平線征程 5 強大算力與感知能力的保駕護航下,覺非在自動駕駛車輛的定位上,融合了激光點云或者視覺感知信息、車身信號與高精度地圖數據,通過適配層、算法支撐層與融合層,將多種車輛信息與環境信息進行實時數據融合計算。
城市道路行駛 融合定位能力應對各類復雜場景
在用戶城市通勤過程中,可應對如夜間行駛、變道、掉頭、過收費站等各類場景,為車輛提供更加穩定、可靠的定位信息與姿態信息。
此次地平線與覺非科技攜手的「城市通勤融合定位量產解決方案」,全部通過量產車上的傳感器實現,相當于把 L4 級別的自動駕駛能力,降維應用到了量產乘用車上,使車輛通過自定位與實時建圖的技術形成「環境記憶」,方案的可擴展性為后續的量產落地創造了契機。
目前雙方已完成了對「城市通勤融合定位量產解決方案」的實踐驗證,下一步將以「芯片+解決方案」集成的形式,聯合推動在乘用車上的量產與規模化應用。
來源:第一電動網
作者:汽車之心
本文地址:http://www.155ck.com/kol/182020
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號