自動駕駛技術感知路線之爭一直是行業關注的焦點。
雖然特斯拉純視覺方案在業內獨領風騷,但多傳感融合方案被業內視為實現自動駕駛安全冗余的關鍵手段。
自動駕駛技術路線之爭的背后,除了對感知硬件能力的苛刻要求之外,其實考驗的是算法——如何讓感知硬件發揮效能最大化。
純視覺玩家為了保障感知數據維度高,降低數據的丟失,采用「一遍過」的前融合算法。
多傳感器融合玩家將安全維度置于首位,在每個傳感器獨立地輸出感知數據信息、處理之后,再匯總處理得出結論,也就是后融合算法。
兩種算法的背后各存利弊,前者對于硬件算力要求更高,后者難以發揮單一傳感器的最大作用。
隨著自動駕駛逐步更加貼近日常駕駛場景,對外部環境探測感知的要求只會越來越高。
01、什么是前融合與后融合算法?
自動駕駛,是一項集感知、決策和控制反饋于一體的技術。
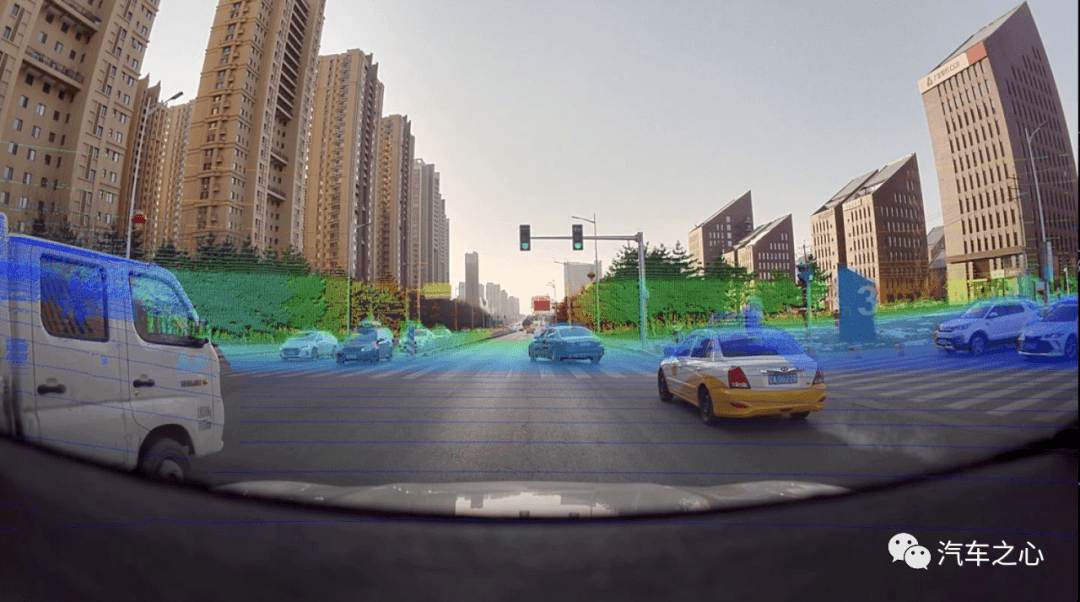
環境感知作為自動駕駛的第一環,是車輛和環境交互的紐帶。
自動駕駛系統整體表現的好壞,很大程度上都取決于感知系統的好壞。
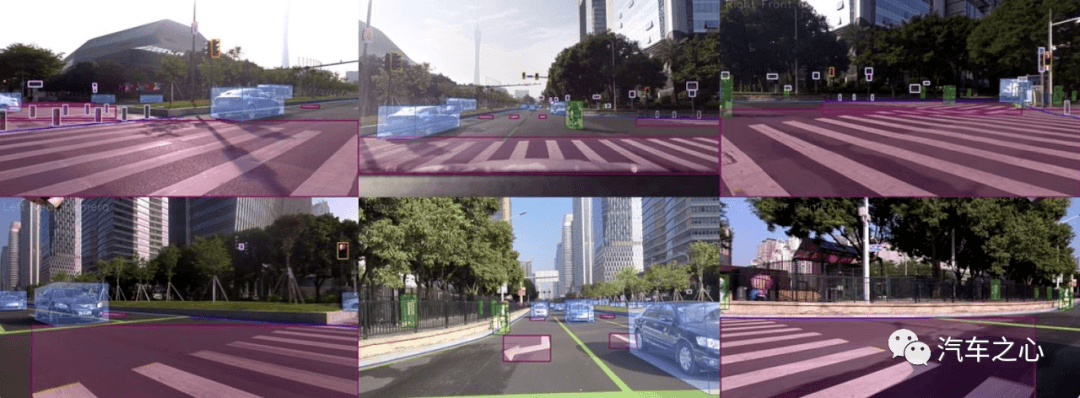
如今,基于多傳感器融合感知已經成為業內的主流方案,多層數據多來源讓最終的感知結果變得更加穩定可靠,更能利用到每個傳感器的優勢:
攝像頭雖然能感知豐富的紋理以及顏色信息,但與障礙物之間的距離的感知能力較弱,同時容易受到光照條件影響;
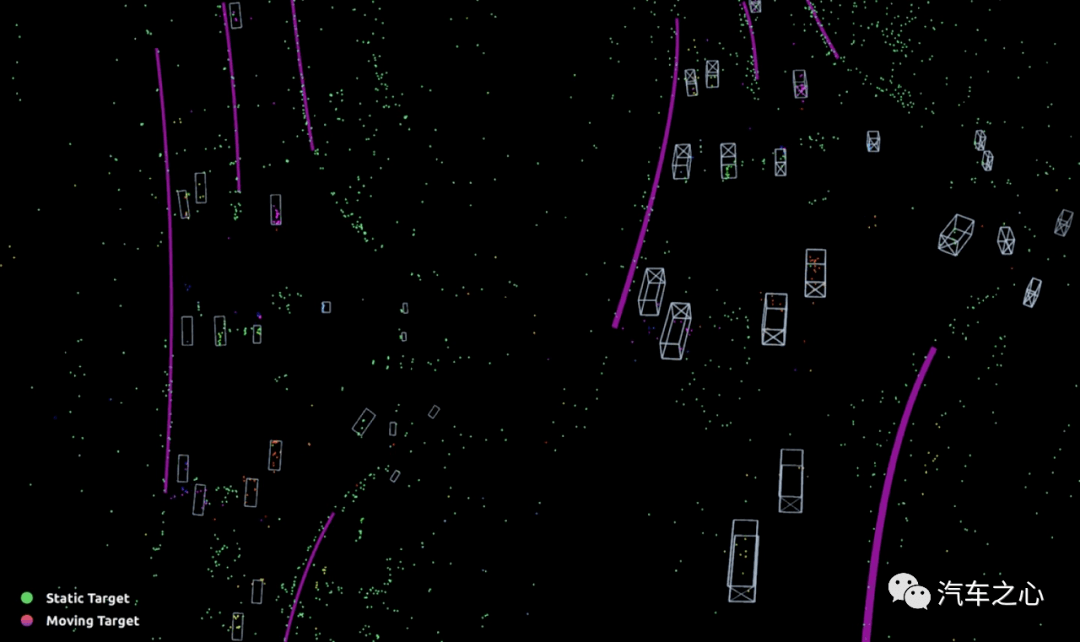
毫米波雷達可以全天候工作,提供精確的距離和速度信息,探測距離也比較遠,但分辨率較低,無法提供物體高度信息。
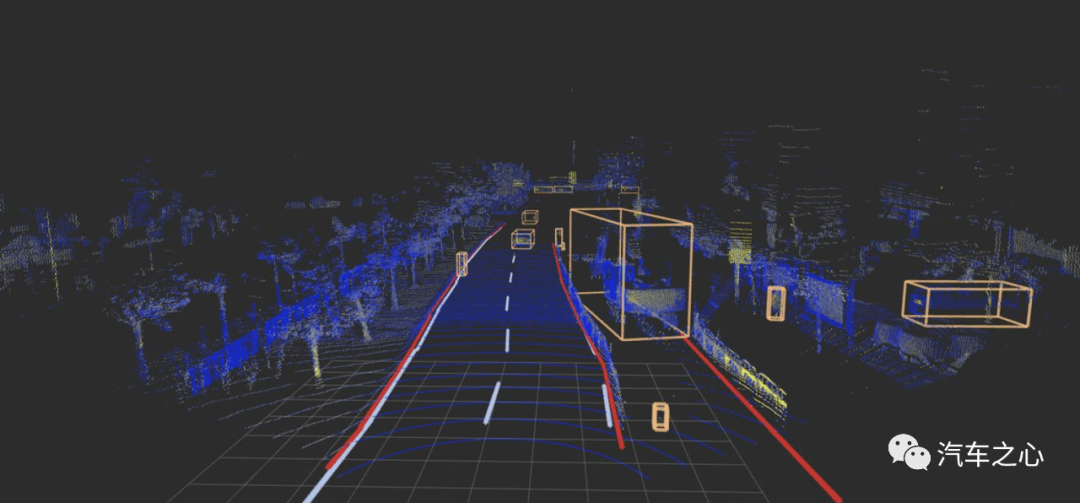
激光雷達雖可以較為準確地感知距離信息,但由于采集的點云稀疏,無法獲得豐富的紋理和顏色等信息。
而多傳感器的融合能夠揚長避短,提高整車安全系數,比如毫米波雷達和攝像頭的融合思路可以迅速排除大量無效的目標區域,極大地提高識別速度。
攝像頭和激光雷達兩者的融合,通過利用視覺圖像信息進行目標檢測,進而獲取障礙物的位置,同時還可以識別出障礙物類別信息。
自動駕駛因其問題復雜度高、安全第一等特性,需要依靠多種傳感器數據的相互融合來提高感知效果。
而將多傳感器信息融合在一起又有多種方式:比如前融合與后融合。
前融合,所有傳感器都運行同一套算法,將來自激光雷達、攝像頭和毫米波雷達的不同原始數據統一處理,相當于一雙超級眼睛通過一套超級算法輸出一個結果。
前融合的代表玩家是特斯拉。
特斯拉將毫米波雷達、攝像頭等傳感裝置的不同原始數據統一處理,整合成一套環繞全車 360°的超級傳感器,再通過 AI 算法來完成整個感知過程。
在特斯拉的這套方案當中,所有的傳感器裝置只負責提供原始數據,而算法則負責對原始數據進行整合。
馬斯克認為,當毫米波雷達和視覺不一致時,視覺有更好的精度,所以純視覺比現有的傳感器融合方式更好。
這種做法優點就在于不會被單一的傳感器信號所影響,所以特斯拉直接移除了毫米波雷達,但這意味著系統對數據的時效性、硬件算力有著極高的要求,需要更高的安全冗余。
這是因為,如果算法出現誤判,最終控制層同樣會做出錯誤的指令。
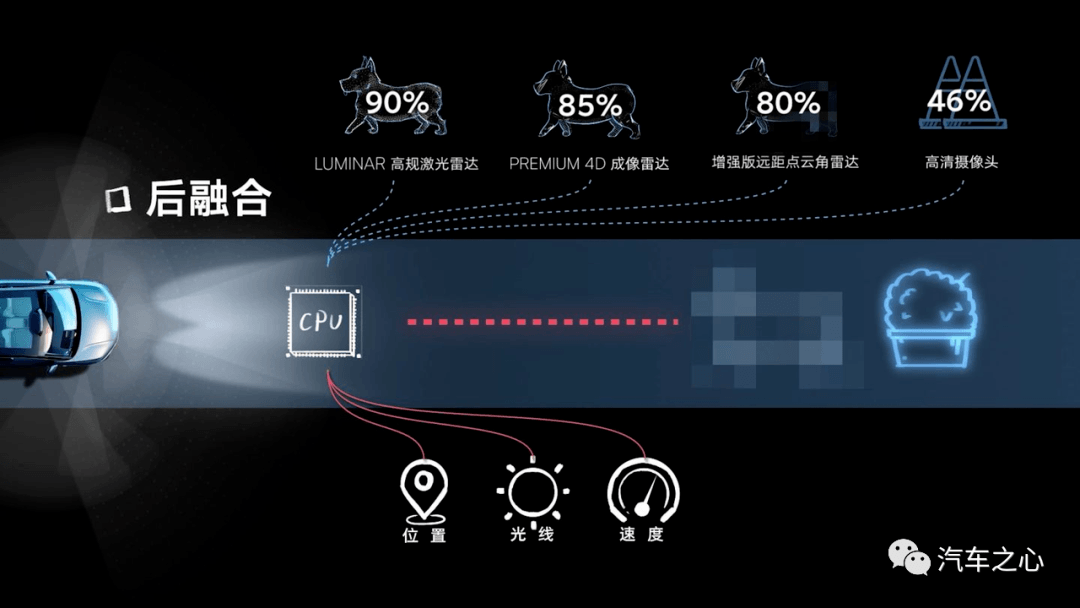
后融合,則通過不同傳感器各司其職——超聲波雷達、攝像頭、毫米波雷達分別通過不同的算法進行獨立的感知。
當所有傳感器完成目標數據(如目標檢測、目標速度預測)生成后,將這些信息和目標列表經過校驗和比對:
在這個過程中,傳感器會通過算法過濾低置信度或者無效的原始數據,最后進行識別物體的合并,完成整個感知過程。
這也是目前業內主流的融合方案。
比如華為 ADS 智能駕駛方案,通過毫米波雷達、攝像頭等傳感器進行不同算法的獨立感知,再分別生成獨立的信息。
舉個例子,激光雷達看到的是一條柯基,毫米波雷達看到的是一條狗,而攝像頭看到的是一只小動物,再將這些信息匯總處理,系統做出綜合判斷。
當然,后融合感知框架也存在先天的不足:
單一傳感器會有能力限制,在特定條件下可能發生誤檢和漏檢,比如攝像頭不擅長判斷距離和位置,雷達不擅長判斷顏色和紋理,系統需要對它們的信息進行互相驗證,才能達到更高的可信度。
元戎啟行 CEO 周光曾舉例指出前、后融合的感知能力:
「假設在你手上有個手機,激光雷達只能看到手機一個角,攝像頭只能看到第二個角,毫米波雷達可以看到第三個角。
如果用后融合算法,由于每個傳感器只能看到一部分,因此物體非常有可能不被識別,最終被濾掉。
但在前融合中,由于它集合了所有數據,相當于可以看到這個手機的三個角,那對于前融合來說,是非常容易識別出這是一臺手機的。」
這種差異化現象自然也產生不同的結果,比如面對相同的復雜場景,后融合出現極端場景的概率為 1%,前融合則能夠將這個概率降低至 0.01%。
兩種技術路線各有優劣,前融合勝于高精度,后融合勝于高效率,背后不同流派的玩家自然各持硬件論、算力論之爭。
02、全融合算法解決了什么問題?
前段時間,知乎有一個關于「自動駕駛的關鍵,是硬件還是軟件」的帖子引起了熱議。
大家爭議的焦點在于硬件上車之后,車企能否將其作用發揮最大化。
在話題的討論中,飛凡汽車智駕團隊首席科學家金杰盂回應:
智能駕駛硬件決定了軟件的天花板,軟件決定了用戶體驗,只不過相對于硬件性能的突破性提升,軟件算法到了必須變革的時刻。
確實,如果自動駕駛能夠一直依靠堆砌硬件的方式解決問題,看起來是一個一勞永逸的方案。
但實際情況是,如果算法能力不能有效跟上,硬件只能淪為擺設。
那么,飛凡汽車如何在智能化時代轉換思考方式,做到「硬件堆砌」不再是一時的商業噱頭,而是能夠讓硬件發揮更高的效率,從而達到同一個硬件在不同場景中發揮不同作用的目標呢?
金杰盂認為,通過軟件的控制,硬件可以在不同場景下呈現出不同的狀態,解決不同的問題,相當于硬件隨時需要成為軟件可以調用的資源。
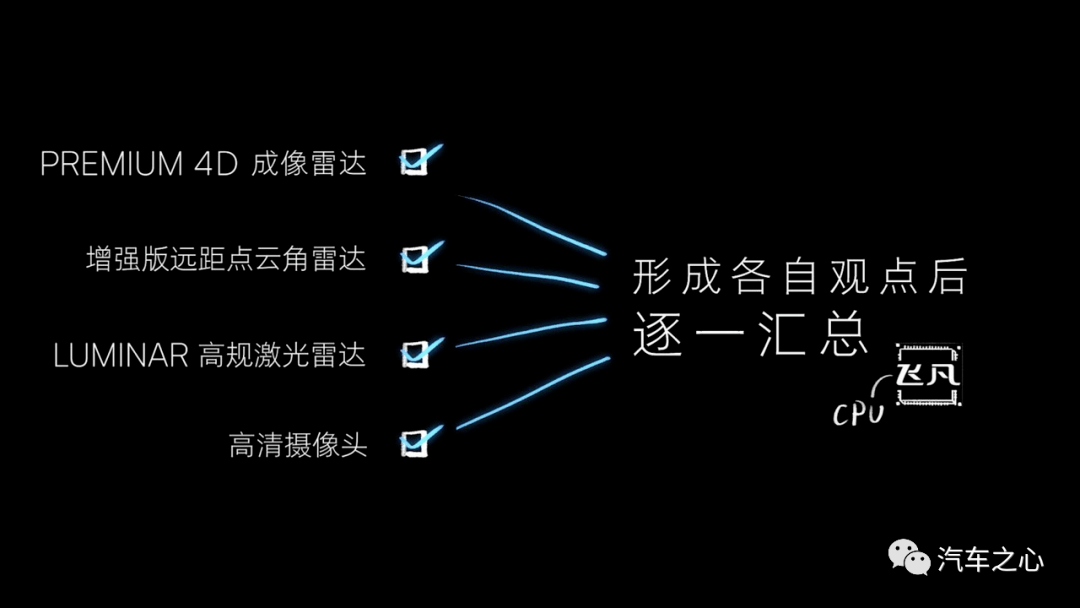
比如在硬件數量層面:飛凡 R7 共搭載了33 個感知硬件,包括國內首發量產的 Premium 4D 成像雷達、增強版遠距離點云角雷達 、厘米級高精定位系統。
而在硬件質量層面:來自 Luminar 的激光雷達,可以實現超 500 米的最遠探測距離以及水平 120°與垂直 26°的探測視角。
兩顆來自德國采埃孚的第五代 Premium 最高性能毫米波雷達,實現最遠探測距離 350 米,高于常規雷達的 210 米,即便是面對惡劣的極端天氣、光照條件,也可以正常運作。
Premium 4D 成像雷達能夠同時對距離、速度、水平方位角、垂直高度四個緯度的識別,包括路沿、道路分岔口等自由空間,以及施工圍欄、雪糕筒等靜止障礙物。
全車 12 個 800 萬像素攝像頭覆蓋車輛 360°的全范圍感知,對動態人車交通參與者、地面標識、紅綠燈、限速標識等交通環境的感知信號更加精準。
最后是軟件算法能力。
飛凡 R7 搭載英偉達 Orin 芯片,單顆算力 254Tops,最高可擴展到 500-1000+Tops,相較于上一代 Xavier 芯片,運算性能提升了 7 倍,能夠快速將路況信息轉化為實際圖像,并快速處理路面突發情況。
這種做法看起來就是在堆砌硬件?但這背后實際的情況是怎么樣的?
金杰盂在知乎的回答中提到一個叫做「全融合」的概念。
「全融合」的工作流程是這樣的:
首先,將前融合的多任務、多特征網絡、深度神經網絡輸出的感知結果,與后融合獨立輸出的感知結果進行綜合比對,實現混合融合;
其次,依靠高帶寬、超算力芯片平臺的安全冗余部署,通過三重融合(毫秒級內)完成感知、融合、預測、決策、執行等一整套動作。
簡單理解,就是先用前融合的思路得出解法,再用后融合的思路得出另一種解法,最后系統再將兩種解法進行融合比對、檢查,得出一個感知、效率雙贏的結果。
那么,飛凡汽車眼中具備軟件變革意義的「全融合算法」,表現如何?
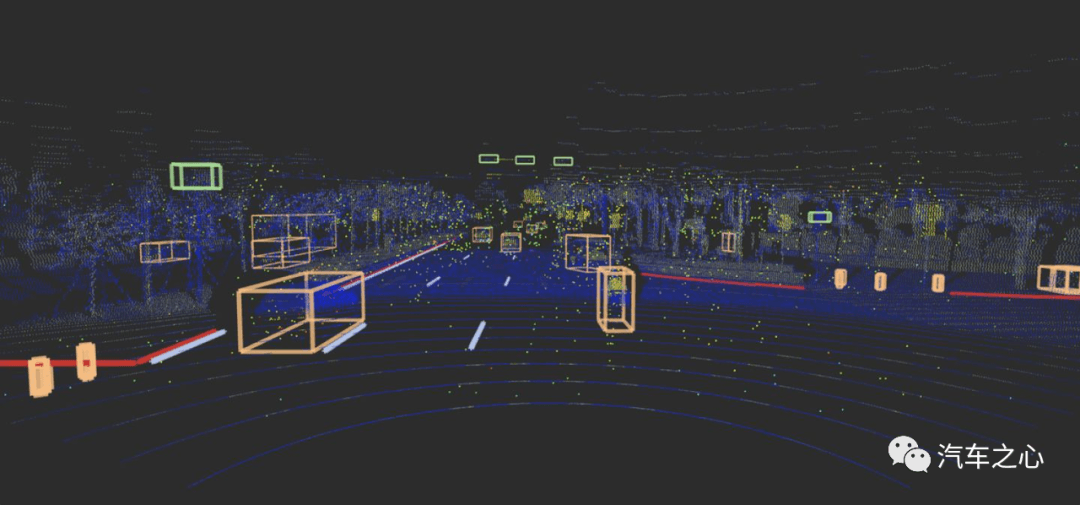
從目前官方公布的視頻來看,飛凡汽車的RISING PILOT 系統主要表現在匝道全域增強識別、超靈敏靜態路障感知、雨雪霧天超視距識別等極端場景。
比如針對目前無法提前識別進入多岔口匝道的三角區域,或者是在匝道口數量多、復雜的情況下,系統識別失敗直接錯過匝道、自動退出等情況。
RISING PILOT 可以通過更遠距離的綜合感知,提前識別匝道三角區域,進而擁有更充裕的時間,在安全的方位內提前進行變道、匯入匝道。
比如遇到施工區域類場景,出現因無法準確識別靜態路障,或者是根本無法識別施工區域而出現碰撞事故的情況:
RISING PILOT 能夠精準識別靜態障礙物的三維幾何位置、尺寸和類型,并快速做出提前避讓的反應。
即便只有雪糕筒或施工提示牌也可提前精準識別,并通過預測和決策模型,快速反應實現提前避讓。
可以預見的是,當智能駕駛經歷了在車載傳感器種類、數量上的花式堆砌,以及在智能駕駛硬件上的算力內卷,想要自家的智駛技術能夠脫穎而出,最終大概率還是要回到軟件算法上。
03、硬件,需要隨時成為軟件算法的調度資源
如果說自動駕駛發展是一個需要長期錘煉的過程,那么「技術迭代」則是這個過程的試金石。
攝像頭從單目升級到多目,像素從 200 萬到800 萬,毫米波雷達從低頻的 24GH 向 77GHz、79GHz 升級,激光雷達翻越車規級量產和降成本兩座大山,從機械旋轉式向 MEMS 演進。
在自動駕駛硬件逐步邁向成熟之后,算法自然成為自動駕駛系統好壞評判的重要依據。
前融合的優勢毋庸置疑,但極少有車企能夠真正把前融合算法做好,幾乎 99% 車企都處于 Demo 階段。
這也就是為什么大多數車企選擇后融合的原因。
在技術尚未真正成熟的背景下,現階段的前融合、后融合在極端場景中逐步暴露出各自的不足,這些問題僅依靠自身軟件算法的升級迭代和硬件的加強,也很難達到 100% 的理想效果。
雖然全融合目前被視為能夠取長補短、避其所短的算法,但對于軟硬件的基礎能力、兩者與整車之間如何達成默契配合仍是難點。
除此之外,不同細分領域的入局者同樣存在不同的觀點,比如堅持前融合才是符合第一性原理的周光就表示:
「算法方面的欠缺,無法靠堆硬件來彌補,要想保障 L4 級 Robotaxi 的安全性,絕不能采用后融合的形式,多傳感器前融合是必要路線。」
何小鵬的觀點是強視覺感知,激光雷達只是輔助作用,并且強調算法和數據的重要性。
「體驗、成本、安全、綜合使用范圍」是何小鵬對于智能駕駛技術優劣的評判,并且四個維度都需要保持一定平衡。
如果硬件堆砌只能帶來硬件水平上的高度,那么軟件才是對戰時最有力的武器。
摩根士丹利曾在報告中提到,傳統的汽車硬件占據了整車價值的 90%,軟件僅占據 10%,但未來軟件所占的價值比重將會提高到 40%,硬件則將下降到 40%。
德勤咨詢更是進一步指出,決定未來汽車差異性的將是軟件及軟件更新迭代所帶來的性能和功能變化。
這也為什么如今全棧自研成為車企追逐的路線,在硬件普遍堆料的背景下,自動駕駛軟件算法已經成為車企打造差異化智能駕駛能力的關鍵。
軟件算法的能力,在硬件水平足夠的前提下,直接決定了自動駕駛性能的實際表現。
來源:第一電動網
作者:汽車之心
本文地址:http://www.155ck.com/kol/185461
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號