7月21日,一場主題為“云上加速,智行萬里”的華為云智能駕駛創新峰會,在內蒙古自治區烏蘭察布舉辦。
會上,北汽研究總院智能網聯中心專業總師林大洋主要詳細闡述了主機廠角度下,高級輔助駕駛系統量產要面臨的挑戰。
01
輔助駕駛開發方式發生變革
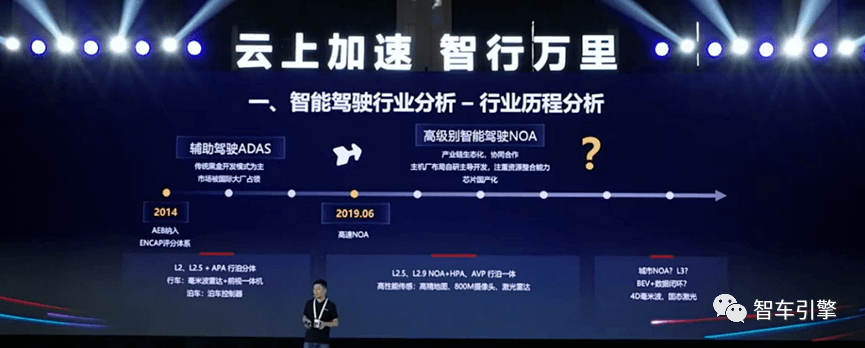
在林大洋看來,低階輔助駕駛到高階輔助駕駛,不僅是功能層面上的演進,在開發模式上也產生了極大變革。
林大洋認為,在ENCAP將AEB納入了評分體系后,輔助駕駛ADAS市場進入爆發和急速增長期。
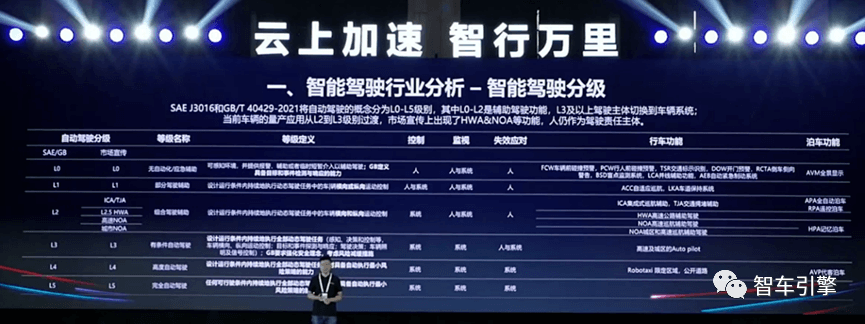
根據 L2的定義智能駕駛系統對車輛既能有橫向控制,也能有縱向控制。林大洋認為,目前整個行業還都處在L2范疇中。只是在L2的演進中出現了很多的分支,就最簡單的L2,即一個毫安波雷達加一個攝像就可以實現的單車道的L2。
隨后出現了L2.5或者叫HWA的功能,即車輛可以在駕駛員觸發變道的前提下去主動變道,但是變道行為是需要駕駛員給予的,并不是系統主動的。
所以L2級別主要還是人駕駛汽車。
在林大洋看來,L2.5及以下還是一些相對低階的,或者是說比較簡單的智駕系統。與之對應的,也是相對傳統的黑盒的開發方式,即主機廠委托供應商黑盒開發。這個階段,市場都是被國際大廠所占領的。
例如,在 ADAS 系統的感知、決策、執行三大環節中,感知由 Mobileye完成。
從NOA功能開始進入高階智能駕駛,即在某些邊界條件下,例如高精地圖覆蓋的范圍內,車輛可以實現點到點的智能駕駛功能,例如,自動駕駛系統自己實現變道、超車、巡航等等的相關的功能。
高階智能駕駛的標志性事件應該是2019年特斯拉發布高速NOA系統。此時高級別智能駕駛系統開始迎來爆發期。與之相對的開發模式,不再是黑盒模式,產業也不再是垂直供應模式,產業開始向生態化的合作、協同合作轉變。
此時大部分主機廠都在尋求自研或者全棧自研。下一步,或許就是做數據閉環,例如在自動駕駛領域引入一些像BEV這種泛以上的大模型;以及一些高性能傳感器,4D毫米波雷達,固態的激光雷達。
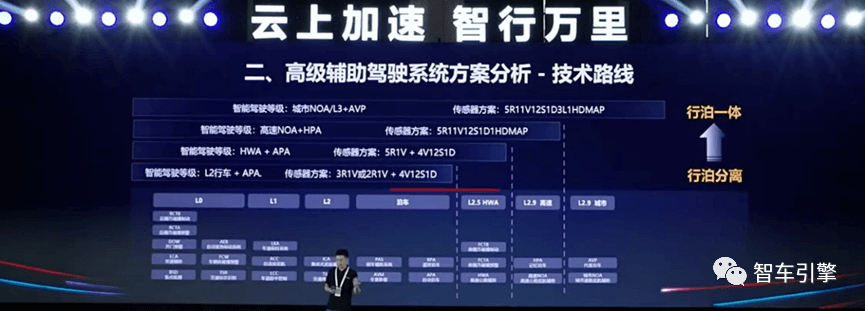
例如,低級別輔助駕駛系統是行泊分離的。行車方面,兩個后角毫米波雷達,前向毫米波雷達+攝像頭可以實現;泊車方面則需要單獨的超聲波雷達+泊車控制器,兩套系統之間基本沒有交互。
進入高級輔助駕駛階段,行泊一體化發展,這就需要在域控器里面做視覺感知算法,做激光點云算法,做所有的決策規劃算法等等。
也就是說高階輔助駕駛功能是向下覆蓋的,比如高速NOA系統需要實現所有的ADAS功能,這就導致輔助駕駛系統的開發難度大幅上升。
高速NOA功能、城市NOA功能有很多的細分的場景。例如高速NOA需要實現駛入駛出匝道、自主的換道等等的,都需要分功能分場景,在開發過程中實現。
在林大洋看來,目前高速NOA的主流路線還是基于高精地圖可以實現,成本也在可接受范圍之內。
不過,在城市的NOA階段,就會有很多自己獨特的功能和場景,例如十字路口的通行、環島的通行、識別紅綠燈等。此時需要引入激光雷達來應對城市里面這些復雜的工況,例如,識別一些復雜的交通參與者;應對corner case(極端情況),比如說車門打開了,能不能把車門打開的輪廓識別出來等。
因此,林大洋認為,就當前的技術,激光雷達是必須的。
02
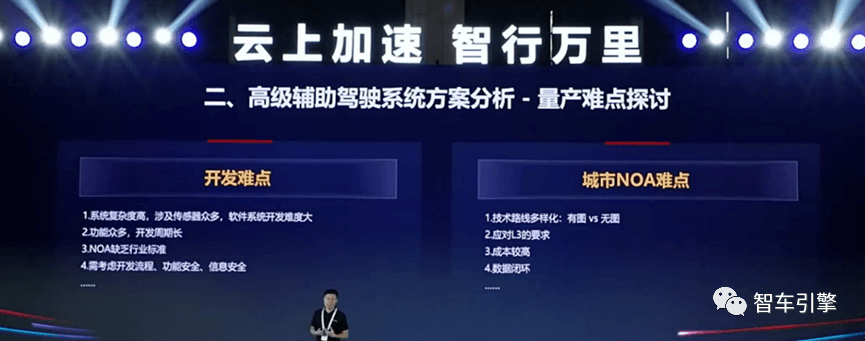
高階自動駕駛量產難點多
首先是,系統復雜度高,涉及傳感器眾多,軟件系統開發難度大。傳感器方面,既有攝像頭,也有毫米波雷達、超聲波雷達、激光雷達,包括組合慣導等等;軟件系統方面,既有MCU里面基于傳統CP跑的軟件系統,也需要分層開發;也有基于在SOC基于AP框架,或者大家基于AP框架寫的一些中間件操作系統,自己定制的內核以及上面的所有的感知和規控算法等。
其次,標準缺乏。這從一個細節就可以看出,NOA功能各家主機廠的叫法是不一樣的,有叫NCA、NGP,以及NOP等等。此外,對于NOA功能邊界在哪里?哪些性能指標是必須要滿足的?上述這些,現在還沒有一個真正意義上的統一的標準。
第三,開發難度大、周期長。由于NOA功能下,主機廠是希望用戶能夠脫手和脫腳,雖然一些法規限制了時長,但在設計時仍然要考慮功能安全、預期功能安全和信息安全等,整個開發難度就會非常大。
軟件架構設計也非常復雜。需要考慮軟件系統怎么來做架構,怎么來做合理的分布,例如,需要考慮一些實時性的東西整放在哪些核上跑;非實時性的,或者說對實時性要求不高,對安全性要求不高,怎么來處理等。
此外,高級輔助駕駛涉及的功能眾多。除了NOA功能,可能還有20多個的ADAS功能,包括了行車、泊車,這些功能其實都需要逐一驗證去開發,然后整個的開發周期還是非常長的。
林大洋還把NOA的難點拿出來單獨闡述。
一是,技術路線多樣化,有圖VS無圖。在他看來,整個城市NOA的技術路線其實是多樣化的,有基于高精地圖的,也有不需要高精地圖的方案,比如說基于BEV或者說重感知輕地圖的,到底哪個方向最優?“我個人認為現在可能會并存,基于高精地圖的城市NOA系統能夠保證量產,其實它是有一個下限的。”
基于BEV的方案,它對數據、算法的開發要求很高,量產難度會比較大,但其一旦量產了,能快速覆蓋很多城市,不會像高精地圖只能在個別城市釋放。
二是,應對L3的要求。林大洋也提出了自己的疑問, “當我們的L3準入后,城市NOA系統和L3關系是什么樣的?”
林大洋表示,他們在開發城市NOA系統時,都會去考慮對于L3的要求,包括冗余、功能安全、流程,包括安全的機制響應等。但是可能在L3的時候, odd不會是城市,一開始釋放的ODD可能還是一個相對比較封閉的場景,比如說高速路等。
三是,成本高。當前的技術方案還是需要依靠激光雷達、需要大算力的芯片,可能某些方案里面需要高精地圖,這就導致成本很高。成本過高就會導致它能搭載的量產車型價格可能還是30萬 —40萬元以上,這樣的價位下很難做到真正的大規模量產。
“一臺車能給智能駕駛系統的成本區間還是有限的,普通意義的車可能3%~5%,一些主打智能駕駛的車可能給到7%-10%,怎么上量是一個比較大的問題。”
四是,打造數據閉環。現在的這種系統基于多張地圖的,包括以后做BEV的,需要整個數據不斷的積累,不斷的迭代,才能不停的覆蓋不斷出現的corner case。
03
北汽量產車型的分享和思考
針對上述智能駕駛的難點,北汽也做了一些嘗試。以北汽極狐和華為合作的極狐阿爾法S先行版為例,這款車使用了華為in inside系統。車型設計上是希望能夠給用戶一個全場景的體驗,包括泊車、行車,例如從小區開始坐上車,到公司的地庫都可以使用輔助駕駛的功能。
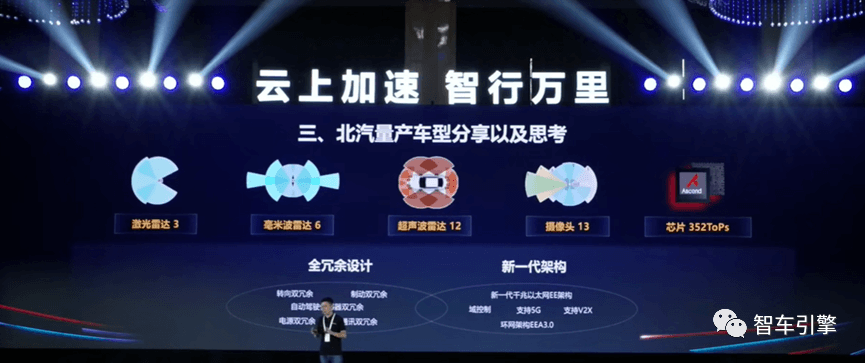
整車層面,在轉向、制動、電源通訊全都做了冗余設計。智能駕駛本身傳感器、控制器、感知的范圍、算力等都做了足夠的冗余。
同時,整車設計時也引入了很多的新一代的技術,包括千兆以太網,支持5G、支持V2X,以及環網架構EEA3.0等。
在城市NOA方面,極狐依賴高精度測距傳感器,使得車輛在城市常規道路和夜間場景下更安全可靠。極狐的城市NOA功能是基于高精地圖,目前已經釋放的城市是深圳、廣州和上海三地。
極狐的目標,是將高階輔助駕駛或城市NOA系統做好,主要還是要將接管率降下來,“比如說在城市場景下,怎么能讓盡可能的出現少接管,或者是說不接管,然后能夠應對城市場景一些突發的情況,是當前做這套系統其實最大的一個挑戰,也是我們會持續發力持續去優化的內容。”
來源:第一電動網
作者:NE時代
本文地址:http://www.155ck.com/kol/207086
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。



先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號