這兩天方程豹豹5這款車在網絡上很火,不久前剛好有這么一個機會,我就來現場替大家親自的體驗一下感受一下這款車!
在開始體驗之前,我們不妨再回顧一下方程豹豹5與越野性能相關的一些產品參數。
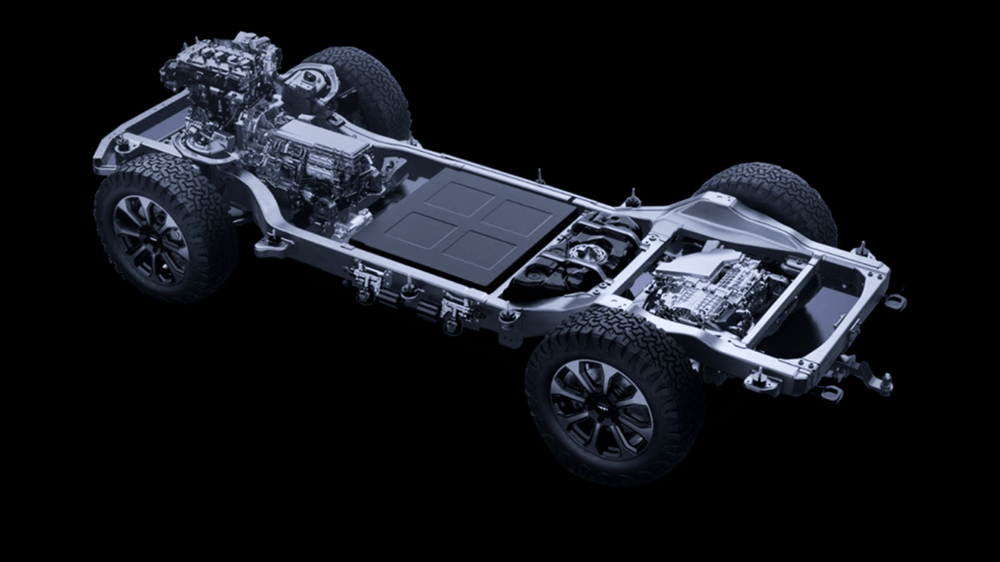
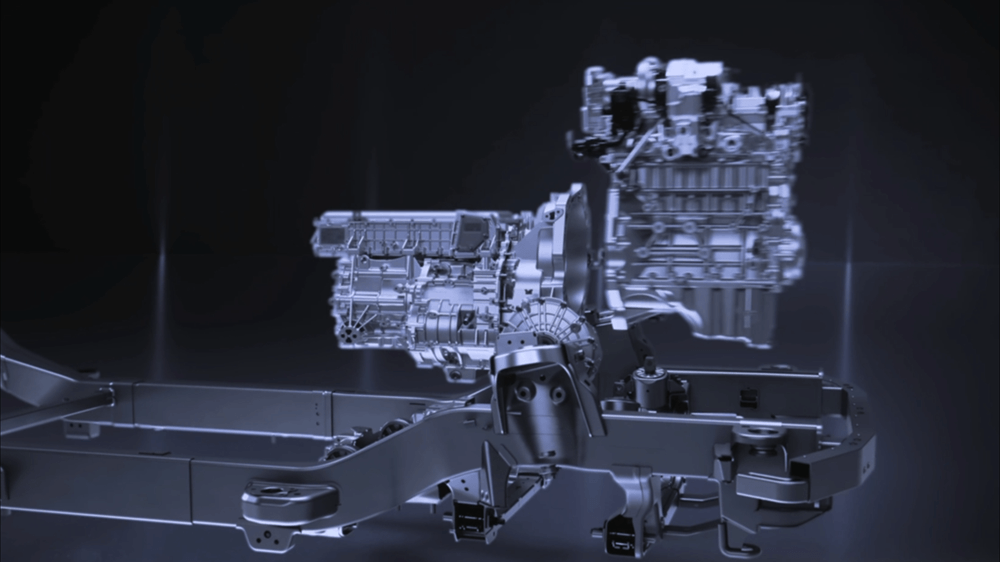
方程豹豹5是基于DMO超級混動越野平臺而來,由全新混動非承載式架構和越野專用混動架構組成。
動力方面,它搭載的是1.5T發動機+前后雙電機、最大輸出近700馬力、4.8秒破百。
配智能電四驅+三把鎖,采用的是帶大梁的非承載式車身結構。
在通過性方面,豹5有39°的接近角,35°的離去角以及27°的縱向通過角,最大離地間隙310mm,最大涉水深度790mm。
這些,都是方程豹豹5有能力去征服戶外越野場景的基本條件。
按照活動方的設定,我們要進行5個針對方程豹豹5的極限越野的挑戰,分別是:階梯路、駝峰路、滑輪組、交叉軸、側坡!
首先是一段比較常規的階梯路,這個模擬的是日常生活中的一些臺階或者較大塊的石子路,相比較而言,是這一組測試中難度很小的了,主要是體驗一下方程豹豹5的動力輸出。
第二個體驗的是駝峰路,看這個鏡頭你就應該可以感受到它的難度了,40度的極限陡坡,這個時候需要把車輛設置為蠕行模式,這也被人稱作為是“傻瓜越野系統”。
在這個模式下,駕駛員不需要踩油門和剎車,只需要專心的控制方向盤,這樣就可以減少在惡劣路面顛簸狀態下油門幅度大小的變化,車輛自己控制上坡的力度和速度,用非常緩慢的速度來通過一些極端路面。主要目的是確保車輛不會因為速度太快而造車車輪打滑導致陷車。
這兒多說一句:我們體驗的是40°的坡,在車內的體驗卻像是70°了,感覺車頭都懟著天了,方程豹豹5最大可以支持45°的坡,但就今天的體驗來看,大多數人的日常生活都不會碰到這樣的情況。
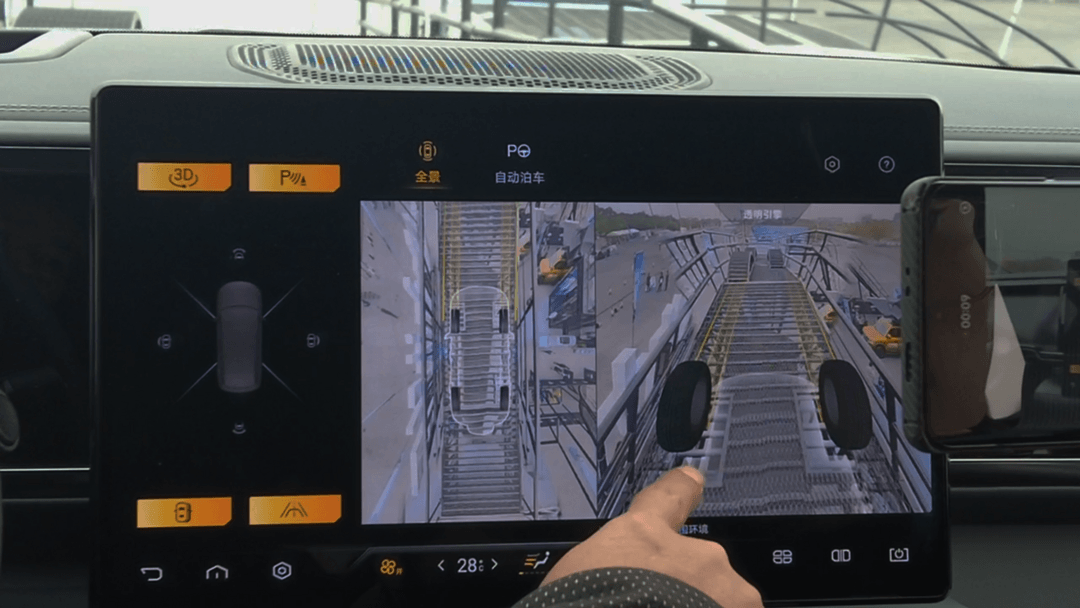
第三個體驗的是滑輪組,說實話,如果不是教練講解和大屏里面的透明底盤顯示的畫面,可能都不太會注意到有這一組測試的發生。
它主要模擬的是汽車在三個車輪打滑只剩1個車輪有驅動力的情況下,汽車怎么脫困。
方程豹豹5有三把鎖以及與之相匹配的電控策略,可以智能進行扭矩的輸出,單一車輪的最大輸出可以達到8000牛米。
第四個體驗的是交叉軸,這也是越野的時候經常會遇到的路況,也就是許多人常說的過炮彈坑,模擬的是兩個車輪已經懸空失去抓地力的情況下,車輛如何在另外2個車輪的驅動下前進。
這個時候,豹5的系統也可以通過差速鎖把動力分配給驅動輪。
除此之外,豹5的非承載式車身也會更有優勢,它不會直接把底盤受到的壓力傳遞給車身從而讓車身變形。所以在整個體驗的過程中,雖然只有2個車輪著地,但你依然可以感受到這輛車有著很好的整體性。
最后一個體驗的是側坡,側坡在靠下的區域角度在26°,在靠上的區域角度達到了接近30°。
這種路況我在上一次開著凱迪拉克銳歌爬天寶雪山的時候有遇到過,但坡度其實也沒這么大。
它主要考驗的車身的抗扭剛度性能、抗彎高度性能、車輛的重心高度。
26°的坡看上去其實不大,但其實在體驗這個項目的過程中,你依然會擔心會不會翻車。
不過其實思考一下咱們的中學物理,只要整車包含幾個乘員的重心在支點,也就是右邊車輪的左側,就不至于會翻車了。
隨后體驗的是另外2個常規挑戰:一個是百公里加速,一個是S彎。
這2個項目一個是考驗豹5的加速性;另一個注意是考驗它在彎道情況下車身姿態控制能力、對側傾的抑制能力等等。
結束語:
整體體驗下來可以感受到基于混動架構的方程豹豹5在越野這塊的性能還是相當硬核的,比較好的把傳統越野和新能源的電驅動的優勢都結合起來了。
只可惜,本次的體驗的車型不是搭載云輦P的頂配版本,而且體驗的時間確實太短了,我也沒有機會去感受到這款車更多的產品特性,后續有機會我們深度體驗完之后再來和大家聊。
來源:第一電動網
作者:二師兄玩車
本文地址:http://www.155ck.com/kol/214492
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。



先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!
























 京公網安備
11010502033163號
京公網安備
11010502033163號