蓋世汽車訊 近年來,人工智能系統已廣泛部署于自動駕駛汽車、最后一英里配送、餐廳服務、患者篩查、醫院清潔、膳食準備、建筑安全和倉庫包裝等領域。
據外媒報道,麻省理工學院(MIT)的工程師為機器人專家開發出一種通用設計工具,可改進自動駕駛機器人系統。該團隊設計出一種優化代碼,可應用于幾乎所有的自動駕駛機器人系統的仿真,并可用于自動識別如何以及在何處調整系統以提高機器人的性能。
圖片來源:MIT
該團隊表明,該工具能夠快速提高兩個非常不同的自動駕駛系統的性能:一個是機器人在兩個障礙物間的路徑中導航,另一個是兩個機器人共同移動一個沉重的箱子。
研究人員希望該全新通用優化器可以幫助加快自動駕駛系統的開發,包括步行機器人和自動駕駛車輛,柔軟和靈巧的機器人,以及協作機器人團隊。
倒置設計
在觀察了可用于其他工程學科的大量自動化設計工具后,研究成員、麻省理工學院研究生Charles Dawson和麻省理工學院航空航天系助理教授ChuChu Fan意識到需要一個通用的優化工具。
通常,機器人專家需要首先開發仿真系統及其許多交互子系統(例如規劃、控制、感知和硬件組件)來優化自動駕駛系統,然后調整每個組件的某些參數并向前運行仿真,以查看該系統在該場景中的表現。
只有在通過反復試驗運行許多場景之后,機器人專家才能確定參數的最佳組合以產生所需的性能。該過程乏味、過度定制和耗時,因此Dawson和Fan決定進行改變。
研究人員們開發出一種優化框架或計算機代碼,可以自動找到微調現有自動駕駛系統,以達到預期結果。
該代碼的核心是基于自動微分或“autodiff”(一種在機器學習社區中開發的編程工具,最初用于訓練神經網絡)。Autodiff可以快速有效地“評估導數”或覺察到計算機程序中任何參數變化。Dawson和Fan正是基于autodiff編程的最新進展為自動駕駛機器人系統開發出通用優化工具。
打造更好的機器人
該團隊在兩個獨立的自動駕駛機器人系統上測試了他們的新工具,并發現與傳統的優化方法相比,該工具在實驗室實驗中迅速提高了每個系統的性能。
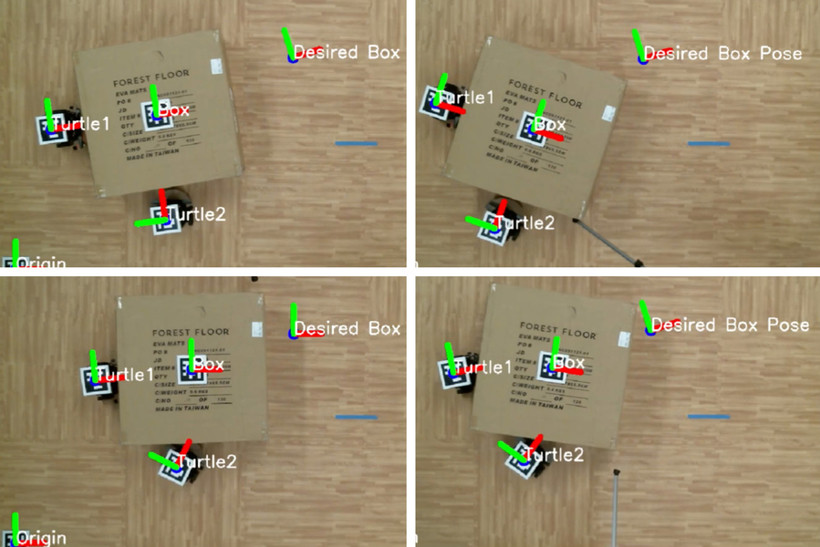
圖片來源:MIT
第一個系統包括一個輪式機器人,其任務是根據從在不同位置的兩個信標接收到的信號,規劃兩個障礙物之間的路徑。該團隊試圖找到信標的最佳位置,以便在障礙物之間形成一條清晰的路徑。
他們發現新的優化器可以快速通過機器人的仿真進行反饋,并在5分鐘內確定信標的最佳位置,而傳統方法需要15分鐘。
第二個系統更復雜,包括兩個輪式機器人一起工作,將一個盒子推向一個目標位置。該系統的仿真包括更多的子系統和參數。盡管如此,該團隊的工具還是有效地確定了機器人完成目標所需的步驟,優化過程比傳統方法快20倍。
該團隊提供該通用優化器下載選項,并計劃進一步改進代碼以應用于更復雜的系統,例如旨在與人類交互和與人類一起工作的機器人。

來源:蓋世汽車
作者:劉麗婷
本文地址:http://www.155ck.com/news/jishu/178600
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號