如果無人駕駛要實現商業化,首先突破的領域會是什么?
馭勢科技給出的答案是,在封閉限定場景的低速無人駕駛車。
目前,馭勢科技已經在廣州白云機場與杭州來福士廣場開始無人駕駛(地下車庫擺渡車)的商業化試運營,未來,它還將與華夏幸福在城鎮新區半開放環境合作推進運營項目。據馭勢科技CEO吳甘沙介紹,馭勢將在今年年底實現產品量產,預計到2020年實現10萬輛規模的運營車輛。
在3月31日-4月1日期間,你從白云機場遠機位下飛機,去往P4航站樓,或是剛從杭州來福士地下停車場的電梯出來,去開自己那輛停得挺遠的車,都可以搭載一輛馭勢科技的自動駕駛小車前往。
那么,為什么馭勢會選擇從封閉場景低速無人車開始切入呢?馭勢如何看待通用場景下(高速,80km/h以上)的無人駕駛,正值柯潔與AlphaGo烏鎮對戰,無人駕駛又能如何用到深度學習和人工智能呢?馭勢在商業化落地中又遇到了哪些挑戰,采用了什么手段解決?近日,作者專訪了馭勢科技CEO吳甘沙。
通用場景的無人駕駛還差些火候
當加州已經開放無人駕駛車路測申請,并有包括特斯拉、百度等在內的20家企業已經拿自己的車輛上路測試時,中國國內還沒有這樣的適用法律出來。去年,長安與博世合作打造的一輛無人駕駛車,打算從重慶一路北上一千公里參加北京車展,但由于沒有相應法規規范,中途被叫停。
直到現在,關于無人駕駛測試,仍沒有正式法規出臺,百度要測試那輛與奇瑞合作后改造的無人駕駛版EQ,也只能趁著夜色在中關村低調地跑一跑。
在吳甘沙看來,中國要出臺一個適用于無人車的公共道路測試規范,至少還需要一年時間。而面向自動(輔助)駕駛出臺制定底層基礎法律,還要1-2年時間,無人駕駛道路基本法可能就更長了,要3-5年。
除了法律法規,圍繞無人車的基礎設施建設、技術成熟度、無人車成本(包括最重要的激光雷達成本、整車價格等)、乃至社會接受度,都是影響無人車發展的因素。
但在這些林林總總的數據之中,吳甘沙所帶領的馭勢科技卻拆解出來一個新場景:激光雷達成本、V2X、高精度定位降到合理水平可能需要3年以上,不過將低速無人駕駛電動車的價格降到10到20萬左右,卻可能是在三年內就能見到的事情。
“問起我周圍那些開特斯拉的朋友,他們對那套自動輔助駕駛系統(目前是L2級別)不是特別敢用。”吳甘沙說道,要社會層面接受高速公路上(開放道路)2-3級的自動駕駛,至少要需要3年時間,而與之對應的,在限定場景下的低速無人駕駛卻能在1到2年內為人所接受。
馭勢科技的無人駕駛落地嘗試
馭勢科技此前對低速無人車的應用場景進行了一番調研,發現即使是低速場景,要運營起來也不簡單。
給政府做訂單自不必說,政府需求不是市場需求,使用頻次一般較低,同時維護成本可能更高昂一些,后期也沉淀不了多少商業價值;最初馭勢科技將目光瞄向了景區無人車,但幾番切磋下來,馭勢最終得出來一個結論:看上去很美的景區反而不是低速無人車的第一波需求。
對于景區來說,一到旺季,就會需要大量車輛(無人車)來運送游客,在這種情況下,如何保證乘客的安全、并且能在短時間內快速疏通游客成為景區的第一訴求,而這就要求成規模地部署無人車。馭勢的這輛車此前只在房山進行過展示和訓練,顯然,直接進景區載客時機尚不成熟。

三月初,馭勢科技開始與廣州白云機場談機場擺渡事宜。這也是這輛車第一次經歷長途運輸、在外地進行測試和部署,用時不到一個月,3月底,馭勢無人車在白云機場進行了無人駕駛的試運營,為期三天。“這也是馭勢進行的首次真實現場運營。”吳甘沙說道。
畢竟之前這輛車是針對景區設計,在到達白云機場前沒有進行過實地適配,三月末,正趕上南方的梅雨季節,馭勢這輛無人車沒有車門,車內的人員會被雨淋濕,馭勢又針對性進行了防雨防濕設計,理順了現場的管理、保安、保險等等。
這次試運營算是秀肌肉,馭勢科技首席架構師彭進展介紹道,目前雙方已經拓展了新場景,即進行航站樓通道間的擺渡,這個場景相對前者來說更好,因為這個通道只是擺渡車運行,沒有行人,場景更簡單。彭進展算了一筆賬,通道的擺渡應用頻次比較高,每天吞吐近萬人次,年吞吐量在300多萬人次,到時真正跑起來,投入10輛車,建立3班倒的司機隊伍,能產生可觀的收益。
對于馭勢來說,這是一個高端高頻高收益,同時又是低風險的場景。通過機場這一個B端,獲取的是機場人群這一高端客群。
凱德集團是一個聽聞馭勢并主動找上門的客戶,需求是給杭州來福士購物中心做地下車庫擺渡。
目前,主流采用的定位方式是GPS定位,但GPS信號在樓宇遮擋的情況下就會迅速衰減,到了地下停車場,GPS就太弱了,必須找到一種新的定位方法,這里會用到的是SLAM(Simultaneous localization and mapping),即能夠同時完成定位和地圖測繪。
據吳甘沙介紹,目前馭勢的方案采用視覺SLAM與激光雷達SLAM兩種方法,在具體實現路徑上,馭勢會先去獲取地下停車場的CAD圖,將視覺和激光雷達點云與CAD進行匹配,在此基礎上進行傳感器的多感知融合定位,另外,馭勢還在地下車庫中設置了很多二維碼,作為無人駕駛車參考的標記,類似航路系統中的waypoint,即航途基準點。
除了這些,地下車庫還有一些比較獨特、需要具體去解決的攻關難題。比如,地下停車場的燈光較為復雜,攝像頭方案常見的致盲等問題便是因為光線突然變化,對此,馭勢的解決方案是以激光雷達輔助攝像頭,以傳感器融合的方式做多感知冗余。
此外,這個場景還涉及到人車混行,彭進展介紹道,馭勢對此進行了多次連續避障訓練,同時由于加入了行人運動軌跡預測、行為預測,所以車輛在實際行進時會比較流暢,不會有頓挫感。馭勢還對地庫的矮小障礙物閃避進行了模擬訓練,用以應對地庫中出現的兒童、動物等道路參與者。
空間狹小也是地庫中必須要解決的問題,這主要體現在地庫中轉彎半徑小,類似人類駕駛員在出入停車庫時應對的螺旋形道路對無人車就是典型的挑戰,另外,馭勢科技還對整體的規劃控制問題進行了優化,比如面對減速帶的情況。整體來說,馭勢科技與來福士進行配合,一天內將無人擺渡車項目部署上線。
馭勢科技在深度學習方面的想法
吳甘沙坦言,從Demo到實際場景的運營,其復雜度、機動性是上了一個臺階的。這就像從原來葉問對著詠春木人樁練習,到與少林18銅人對戰,由靜入動,在這種情況下,如何判斷態勢、評估他者(人或動態物體)的動機、預測其行為,并合理獲得路權至關重要。
比如,老司機在開車時會根據前方車速快慢決定是否超車、并線,目前,馭勢科技使用的是強化學習的方法模仿老司機,在100公里的時速下,可以在前車行駛過慢時進行打燈并線、超車、之后再并線回到原來車道。
但使用大數據驅動深度學習也有命門:即機器很可能會出現訓練集中毒、偏差——人舉著啞鈴的圖片作為數據輸入,不斷訓練的結果是,機器會將這段舉著啞鈴的胳膊也當成啞鈴的組成部分。
此外,深度學習最著名的命門,也是至今學術界和研發人員未解決的問題,就是人們并不明白系統是怎么工作的,其原理是一個黑盒子,不具有可解釋性。這個選擇為什么好、為什么差甚至一定程度上是隨機的。
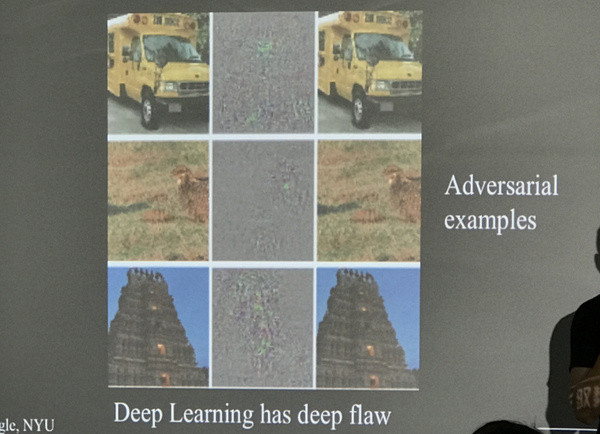
比如,Christian Szegedy等人曾在ICLR2014發表的論文中提出了對抗樣本(Adversarial examples)的概念,即在數據集中通過故意添加細微的干擾所形成的輸入樣本,受干擾之后的輸入導致模型以高置信度會得出一個錯誤的輸出。在他們的論文中,他們發現包括卷積神經網絡(Convolutional Neural Network, CNN)在內的深度學習模型對于對抗樣本都具有極高的脆弱性。
我們人眼可以輕而易舉識別出來的圖像、物體,假以對抗樣本,機器通過深度學習卻完全識別不出來。
吳甘沙認為,在開放動態環境下的無人駕駛需要更強壯的AI,要建立這樣一種AI,需要深度學習和強化學習兩種打法結合。強化學習追求可解釋的邏輯推理(理性思考)、強調常識、經驗、可以積累的背景知識,同時輔以遷移學習的舉一反三、基于貝葉斯的因果推理。
現在在開放道路無人駕駛做得最好的是谷歌Waymo,每5000千英里(合8000多公里)需要一次人類干預,特斯拉每3英里需要一次人類干預,而自動駕駛新秀Uber則每英里需要一次人類干預。但即使是做得最好的Waymo,也不及人類駕駛員的萬分之一,人類駕駛員每9000萬英里出一次小型事故。
一個很快的解決方案就是使用模擬、仿真,即基于大數據進行快速建模,模擬天氣、光照、雨天等,用模擬、仿真+強化學習、以及生成性對抗網絡(用于中和上文提到的對抗樣本,進行降噪,貼出為真、為假的標簽)作無人駕駛中的深度學習。
這幾日柯潔在烏鎮連連敗給AlphaGo,人工智能將不可避免地成為無人駕駛領域的重要探索方向。馭勢目前正在與國內外研究機構合作研發駕駛AI,國際著名Tier 1供應商博世也建立了自己的AI孵化器。
無人駕駛AlphaGo比肩人類駕駛員的那一天,或許就在不久后到來。
來源:36氪
本文地址:http://www.155ck.com/news/jishu/52433
以上內容轉載自36氪,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號