特斯拉的 Autopilot 并不是業內最早量產的自動駕駛系統。
但在 2014 年發布以后,Autopilot 憑借完善的功能定義、依靠眾包數據不斷學習的算法,以及通過 OTA 實現的軟件升級,已經成為全球范圍內部署規模最大、運行里程最長的(單一)自動駕駛系統。

在 2014 年 10 月以后,Autopilot 的硬件就默認搭載在每一輛出廠的 Model S、Model X 和 Model 3 上。
到 2019 年 Q3 結束,特斯拉在全球一共交付了近 79 萬臺車,其中 74 萬臺都搭載了 Autopilot 的硬件。
根據 MIT Human Centered AI 項目的估算,到 2019 年 Q3 特斯拉所有售出車輛的累計行駛里程約 168 億英里,其中通過 Autopilot 行駛的里程數達到 18.8 億英里 [1]。
Autopilot 的意義也并不止于為用戶提供一種更輕松的駕駛體驗。
在 Model S 和 Model X 交付后,其提供的智能體驗啟發影響了一大批行業內外的從業者,并極大程度地推動了全世界范圍內智能汽車和自動駕駛的發展。
Autopilot 的故事,是量產自動駕駛領域,到 2019 年為止最經典的兩個案例之一,另一個案例是 Mobileye(見《Mobileye 成長史上的 5 個關鍵時刻》)。

2013 年,特斯拉與 Google 的核心分歧
特斯拉在內部提出 Autopilot 的規劃最早是在 2013 年。
2013 年 10 月,Autopilot 招聘了第一名員工 Drew Gray。到 2014 年 10 月硬件發布,第一代 Autopilot 硬件的研發只有不到 1 年時間。
少為人知的是,在 Autopilot 項目規劃的初期,Elon Musk 曾經與 Google 探討過聯合開發一套高速公路自動駕駛系統的可能性 [2]。
當時 Google 方面,內部的自動駕駛項目已經研發了幾年,技術上有了一些初步的成果,公司也有意將技術進行商業化。
Google 第一個商業化的想法是推出一套能夠在高速公路上單車道內實現自動駕駛的系統。這套系統允許駕駛員雙手離開方向盤,但要求用戶在車輛行駛時時刻注意前方。
2013 年上半年,項目組已經開始邀請內部員工參與這套系統的測試 [3]。
巧合的是,Google 將這套系統命名為「AutoPilot」,這和日后特斯拉的「Autopilot」只有一個字母大小寫的差別。
但 Google 的技術最終沒有在特斯拉上實現量產。
主要的原因是,2013 年 Google 很快叫停了 AutoPilot 的測試。當時公司邀請了一批每天需要通過高速公路長途通勤的員工來參與系統測試。
幾周后,一名員工在自動駕駛的車上睡著了。

2013 年 Google 半自動駕駛測試,員工在車上化妝
現任 Waymo CEO John Krafcik 后來闡述過內部的想法,團隊認為半自動駕駛系統是不可靠的。因為「當你把這個系統開發得越好,人們就越容易過度信賴它。」
在叫停半自動駕駛項目之后,Google 與特斯拉走上了完全不同的兩條道路。
前者轉向全力研發 L4 - L5 級完全無人的機器駕駛系統,特斯拉則很快選擇了與 Mobileye 合作,開發第一代的 Autopilot。

借助 Mobileye,Autopilot 1.0 發布

Autopilot 在設計之初就采用了硬件先行、軟件更新的原則。
2014 年 10 月,特斯拉宣布所有新出廠的車輛都會默認搭載 Autopilot 硬件,但實際上這套系統完整的軟件功能,是通過特斯拉 V7.0 版本的更新為用戶開啟的。
V7.0 版本開始推送的時間是一年后,也就是 2015 年 10 月。
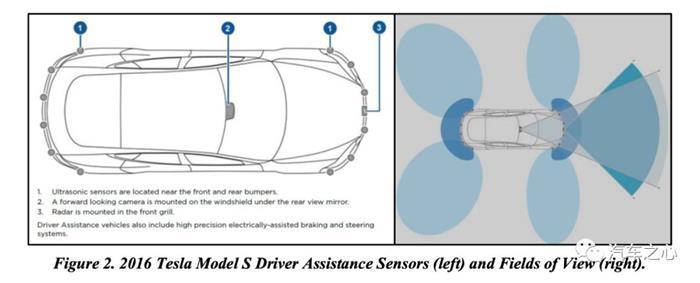
這個時期出廠的每一輛特斯拉,都搭載了 1 個前向的毫米波雷達、1 個前視攝像頭、12 個超聲波雷達、1 套高精度電子輔助制動系統(線控剎車)以及一塊搭載 Mobileye EyeQ3 芯片的主板,這套硬件被稱為 Autopilot Hardware 1.0。
2014 年也是 EyeQ3 投產的第一年,Autopilot 是全球最早搭載 EyeQ3 的系統。
有意思的是,再過 4 年后,當 EyeQ4 投產時,其全球首發車型將會是蔚來的 ES8。這時 EyeQ4 上跑的是蔚來的 NIOPilot。蔚來在很長一段時間內都被視作特斯拉最有力的競爭對手之一。
Autopilot 組建初期的成員,主要來自包括加州伯克利、卡耐基梅隆、康奈爾、麻省理工在內的幾所高校,以及大眾汽車位于加州的 Electronic Research Lab。
在與 Mobileye 的合作中,Autopilot 的這支初期團隊直接承擔了 Tier 1 的角色 [4]。
特斯拉沒有再選擇一家成熟的 Tier 1 與 Mobileye 聯合開發,這樣的做法可能和 Autopilot 激進的時間表有關。
在特斯拉身上,與 Tier 2 二級供應商直接合作開發子系統的案例非常常見。如果 Tier 1 提供的子系統在成本、性能或者時間表上無法滿足需求,特斯拉就有可能親自下場。
例如早期特斯拉在 Model S 上曾經采用臺灣的富田電機,之后內部改為自研電機,并將原有供應商降為供應電機定子和轉子。
從這個角度來講,要進入并且留在特斯拉的供應鏈體系,對供應商的要求是在某個垂直領域有很深的積累,長板非常長。
特斯拉同時還要求供應商技術演進的節奏要非常快,這在一定程度上也讓相當數量的 Tier 1 難以適應。
今天我們能看到的 Autopilot 中最終保留下來的供應商,多數是深耕多年的傳感器供應商和芯片 IP 提供商。
盡管特斯拉是智能電動車領域的先驅者,但在 2014 年,高性能的三電系統已經不再是特斯拉獨有的優勢。
由于多重歷史原因(見《十年前,戴姆勒救了特斯拉》),戴姆勒和豐田在 Model S 上市前就已經是特斯拉的投資人和客戶。
2014 年,特斯拉是戴姆勒旗下 Smart fortwo、A-Class、B-Class 車型的電動動力總成供應商,同時它也將三電系統供應給豐田的 RAV4 EV [5]。
Autopilot 發布后,智能駕駛成為拉動特斯拉銷量的重要賣點。
一個極端的案例是,理想汽車的創辦人李想就擁有 4 輛特斯拉,包括 1 輛沒有 Autopilot 的 Model S、1 輛搭載 Autopilot 1.0 的 Model X、1 輛搭載 Autopilot 2.0 的 Mode X 和 1 輛 Model 3。他本人曾講過買 2 輛 Model X,很大程度上就是為了體驗 Autopilot。

2016 年,Joshua Brown 之死
伴隨著一輛輛新車下線,特斯拉在官方文本中這樣介紹 Autopilot:
全新的硬件并不是為了無人駕駛設計的,真正的無人駕駛還要數年才能到來。而 Autopilot 希望把駕駛員們從最無聊和危險的路況中解放出來。
最重要的是,特斯拉的文本明確地告訴車主:(盡管有 Autopilot 存在)駕駛員依然是車輛行駛過程中最終的控制方和責任方。
2015 年 10 月,特斯拉開始向全球車主陸續推送 V7.0 版本的軟件更新,Autopilot 的主要功能得以解鎖。7 個月后,Google 曾經最擔心的事情發生了。
2016 年 5 月,在佛羅里達一段沒有完全封閉的高速公路上,Joshua Brown 駕駛的一輛 Model S,撞上了一輛拐彎中的貨車。
當時的高速路段上是藍天白云,Model S 上的 Autopilot 處于開啟狀態。
貨車正在拐彎,但 Autopilot 沒有識別出貨車白色的掛車車廂,因此擋風玻璃首先撞上了車廂底部。黑色的 Model S 從車廂底部穿出,最后在高速公路邊的草地中停了下來。
Joshua Brown 在這場車禍中喪生。
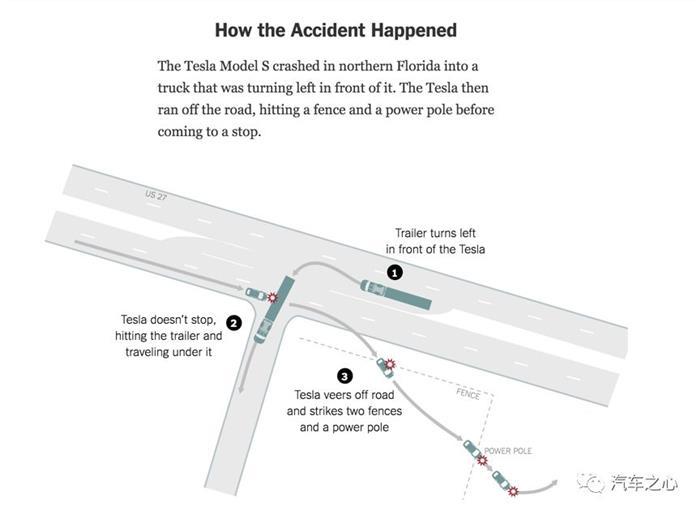
佛羅里達事故的示意圖
這起事故被認為是全球范圍內第一起自動駕駛致死事故,引起了非常廣泛的關注和報道(后來人們發現 2016 年 1 月在河北邯鄲還發生過一起特斯拉追尾清掃車的致命事故,因此 Joshua Brown 的事故為第二起)。
作為事故中主要的關聯方,特斯拉和 Mobileye 先后發表了幾份聲明。
特斯拉首先在事故聲明中指出,Joshua Brown 遭遇的是非常罕見的駕駛場景。
「當時天氣晴朗,司機和 Autopilot 在藍天的映襯下都沒有注意到卡車白色的掛車車廂,因此司機和 Autopilot 系統都沒有及時剎車。卡車橫向穿過馬路時,掛車車廂的高度以及從 Model S 上觀察到的視角,構成了一種非常罕見的駕駛場景,最終導致 Model S 與卡車掛車車廂的碰撞。」[6]
特斯拉的聲明發出后,Mobileye 的發言人很快進行了補充,表明事故責任并不在 Mobileye。
「當前的防碰撞技術或者自動緊急制動系統 AEB 的設計,是為了防止與前車車尾的碰撞。在這起事故中,涉及到對橫向行駛車輛的處理,不屬于這一代 AEB 的設計目標。Mobileye 的系統將在 2018 年開始支持對橫穿車輛的檢測識別。」
把 Mobileye 的話翻譯一下就是:Mobileye 在 Autopilot 中提供了 AEB 功能,這個 AEB 本身不支持這樣的場景,但特斯拉允許用戶在這樣的場景下開啟了 Autopilot,因此責任不在 Mobileye。
在 Brown 的事故中,Autopilot 要識別出可能碰撞的橫向車輛,關鍵在于系統的算法以及車載計算平臺需要提供充足的算力支撐算法運行。
在 2018 年以后,Mobileye 將會投產下一代芯片 EyeQ4,也就有更多的算力支撐更復雜的車輛識別算法。
這也是為什么聲明里說「Mobileye 將在 2018 年支持橫穿車輛識別」的原因。

Autopilot 1.0 的缺陷是什么?
顯然,特斯拉沒法一直等著 Mobileye。
在與 Mobileye 的合作中,特斯拉同時也意識到:前者依賴特斯拉在內的各家車輛獲取大數據改進自身算法。但其對 Autopilot 進行改進的積極性和進度都沒有達到令特斯拉滿意的節奏。這讓特斯拉內部決定「自動駕駛這個核心要抓在自己手里」。
2016 年,特斯拉請來了來自 AMD 的芯片大師 Jim Keller,開始組建硬件工程團隊。
同年,特斯拉在內部啟動計算平臺 FSD(Full Self-Driving Computer)的研發,并選擇了英偉達 DRIVE PX2 作為 Autopilot Hardware 2.0 階段性的計算平臺。
與 FSD 這樣的長期準備同步,特斯拉在 Joshua Brown 事故發生 4 個月后,也就是 2016 年 9 月推送的 V8.0 軟件更新中,提出暫時利用毫米波雷達來解決此前事故中暴露的系統缺陷。
毫米波雷達的特點是,擅長橫向信息的測量,比如前方物體的距離和速度,但不擅長縱向信息的測量,比如物體的大小和高度。
它的檢測效果還與物體的材質有關,金屬物體反射的毫米波信號強,但塑料材質的物體反射很弱。
在實際應用時,毫米波雷達容易檢測到前方有無(金屬)物體,但不容易判斷物體的大小和高度。
在 Brown 的事故中,毫米波雷達已經檢測到前方卡車車廂存在,但它無法判斷車廂的高度,結合視覺感知把卡車白色的「車廂」當成了天上的「白云」,最終系統傾向認為車廂是一塊懸在道路上方的路牌。
如果將毫米波雷達調整為主要的傳感器,當再次遇到類似情況,毫米波雷達就可以觸發車輛制動。這樣確實解決了類似 Brown 事故中的問題。
但由于毫米波雷達不善于判斷物體大小和高度,道路上出現易拉罐或者路牌這樣的障礙物時,也容易觸發 Autopilot 誤剎車。
以毫米波雷達為主要傳感器的策略,只持續了幾個月的時間,特斯拉之后會重新切換回以視覺感知為主的策略。

2016 年,Autopilot 1.0 的啟示
Autopilot 的推出與事故,在那個時間,在整個大的汽車行業產生了深遠的影響。
特斯拉到 2016 年,大約賣掉了十幾萬臺搭載 Autopilot Hardware 1.0 的 Model S 和 Model X。
Autopilot 是行業里第一次,在短短 2 年之內,讓全球數十萬規模的先富起來的人群體驗到了自動駕駛系統的可用性。
以 Joshua Brown 的遭遇為代表,事故也暴露出 Autopilot 還遠非完美的自動駕駛系統。
人們意識到,開發比 Autopilot 更好的自動駕駛系統,來提供給特斯拉以外的主機廠們,將是一門巨大的生意。
在世界范圍內,這年大量的自動駕駛公司紛紛創立,相當數量的公司很容易地說服了投資者,頭部公司更是拿到了巨額的資金。
這與 Autopilot 先期對市場的教育一定程度是分不開的。
在解決 Brown 事故中類似的感知問題上,以后的幾年,激光雷達、高分辨率的毫米波雷達、高精度地圖都得到了非常大的關注和資本投入。
自動駕駛領域昔日的明星創業公司 Roadstar.ai 曾經力主深度融合技術 Deep Fusion,就是通過多傳感器數據的前融合來彌補單一傳感器各自存在的缺陷。
2019 年,特斯拉還收購了技術公司 DeepScale(見《特斯拉的第一筆自動駕駛投資》),一部分原因也是為多傳感器融合補課。

Autopilot 2.0,全面替換 Mobileye
在 Autopilot 1.0 的合作中,Mobileye 認為特斯拉開放給用戶的功能太激進,Elon Musk 則認為 Mobileye 同時要支持大量的傳統車企,一定程度上拖慢了技術推進的節奏。
從 2015 年開始,特斯拉已經在內部組建算法和硬件的團隊,為將來替換 Mobileye 做準備。
當年上半年,特斯拉組建了基于視覺感知的軟件算法小組 Autopilot Vision,這個小組最初由 Autopilot 1 號員工 Drew Gray 帶領。
同年,特斯拉招來了原來在微軟負責 Bing Vision 和 HoloLens 的研究總監 David Nistér,David Nistér 接替 Drew Gray,并擔任 Autopilot Vision 副總裁。
次年初,Autopilot 開始內部籌備全自動駕駛芯片 FSD 的研發,FSD 招的第一個團隊成員是 Pete Bannon,Bannon 現在是負責 Autopilot 弱電與芯片工程的副總裁。FSD 項目匯報給 Jim Keller。
2016 年 7 月,Mobileye 與特斯拉合作關系最終破裂了,Joshua Brown 的事故成為「壓死駱駝的最后一根稻草」。
Mobileye CEO Amnon Shashua 在當月的財報會上公開表示,「與特斯拉的合作將止步(Autopilot 1.0 上的)EyeQ3」。
特斯拉隨后在 2016 年 9 月 V8.0 的軟件更新中,將 Autopilot 調整為以毫米波雷達為主的感知方案。
2016 年 10 月,特斯拉推出 Autopilot Hardware 2.0,包含 8 個攝像頭,1 個毫米波雷達,12 個超聲波雷達,以及一塊搭載英偉達 DRIVE PX2 AutoCruise 定制版的計算主板。

Hardware 2.0 雖然上車了,但 Autopilot 軟件端的 Tesla Vision 并沒有開發就緒。
外部恐怕很難想象,特斯拉 Hardware 2.0 的車輛,從 2016 年 9 月到 2017 年 1 月,經歷了 4 個月幾乎裸機的狀態。
Autopilot 的一部分功能在這個階段缺失,包括 AEB、防碰撞預警、車道保持、自適應巡航等。
到 2017 年上半年,由于 Tesla Vision 算法的改進,特斯拉在 V8.1 版本的軟件更新時,Autopilot 的功能重新追上了 Hardware 1.0 時期。

Tesla Vision 追趕 Mobileye
Tesla Vision 來自于 Autopilot 內部在 2015 年成立的 Vision 小組,Vision 的目標就是要取代 Mobileye。
盡管 Vision 小組是屬于 Auotopilot 軟件團隊下的一個分支,但其領導人 David Nistér 的職位是 Autopilot Vision 副總裁,足見特斯拉對這個小組寄予厚望。
Nistér 在 1998 年從愛立信開始投身圖像壓縮與 3D 重建領域。在來特斯拉之前,他在微軟待了 8 年,其開發的技術被用在 Bing Vision 和 HoloLens 上。
David Nistér 過去的研究偏傳統視覺領域,因此 Tesla Vision 從一開始走的是傳統視覺的路線。
從 2016 年開始,特斯拉內部還有一支團隊在做與 Tesla Vision 相關的工作,這支團隊是隸屬于 Autopilot 硬件工程副總裁 Jim Keller 麾下的機器學習小組(Machine Learning team)。
特斯拉從 AMD 挖來傳奇芯片架構師 Jim Keller 時,還從 AMD 挖來了一大批具有多年芯片開發經驗的大牛。
2016 年 2 月開始,Pete Bannon 帶領著來自 AMD 的大牛們開始了完全無人駕駛芯片 FSD 的研發。
同時期,同樣來自 AMD 的谷俊麗,在 Autopilot 硬件工程團隊下開始組建機器學習小組,這個小組有兩個任務:一個是搭建 Hardware 2.0 上的 AI 算法和機器學習軟件,另一個是參與設計 FSD 芯片的架構和上面的軟件。
Vision 小組和機器學習小組在組織架構上是相對獨立的,2 個小組分別匯報給 2 位不同的副總裁,Nistér 和 Keller。
2016 年,Vision 和機器學習小組都成立不久,規模都不大。
特斯拉的原計劃是與 Mobileye 協商一段過渡期:在過渡期內,Autopilot 可以同時運行 Tesla Vision 以及 Mobileye 兩套軟件,但 Mobileye 拒絕了這個提議。
所以就有了前面,先有 Amnon Shashua 宣布雙方合作破裂,再有當年 10 月份 Autopilot 硬件更新但軟件卻跟不上的情況。
2016 年 10 月以前,Tesla Vision 基于傳統視覺的版本在性能和功能上達不到與 Mobileye 對標,10 月以后,Tesla Vision 融合了機器學習團隊基于 AI 的算法。
為了解決車載部署的實時計算問題,Autopilot 機器學習小組當時還設計一套推理(Inference)軟件,來解決了英偉達的配套軟件在實時計算上的速度局限問題。
在 2016 年年底那個時間,特斯拉應該是全球第一家把 AI 算法集成到量產自動駕駛系統中的公司。
Mobileye 當時還在使用傳統視覺的算法,而英偉達當時「對解決自動駕駛問題的算法結構理解還不夠到位」。
2017 年上半年,特斯拉推送 V8.1 的軟件更新,Autopilot 終于重新追平 Mobileye 時期的功能。

軟硬結合,特斯拉走向「汽車界的蘋果」
在特斯拉 2.0 版本的 Autopilot 硬件中,包含 8 個攝像頭,1 個毫米波雷達,12 個超聲波雷達,以及一塊搭載英偉達 DRIVE PX2 AutoCruise 定制版的計算主板。
過去 Mobileye 的 EyeQ3 能提供的算力大約是 0.25 TOPS,它的下一代產品 EyeQ4 的算力是 2.5TOPS。而英偉達為特斯拉定制這塊 DRIVE PX2 算力是 EyeQ3 的 40 倍以上,也就是超過 10 TOPS。
同時,Autopilot 從這一代硬件開始,支持計算平臺的改造升級。Autopilot Hardware 2.0 以后的特斯拉車型,只要拆開車上的手套箱,車主就可以用更高算力的 FSD 替換已有的主板。

Autopilot 1.0 與 2.0 的感知能力對比
與 Autopilot Hardware 1.0 相比,Hardware 2.0 大幅提升了系統的感知能力。
Hardware 1.0 的車上只有 1 個前視攝像頭和 1 個后視攝像頭(不參與自動駕駛)。
而 2.0 的車上配置了 3 個前向的攝像頭和 4 個側向的攝像頭,前向的攝像頭可以檢測 60 米、150 米和 250 米內的范圍,側前向的攝像頭可以檢測 80 米內的范圍,側后向的攝像頭可以檢測 100 米內的范圍,配合前向的毫米波雷達和車身一周的超聲波雷達,Autopilot Hardware 2.0 形成了圍繞車身一周最遠能到 250 米的多重無縫的覆蓋。
Autopilot Hardware 2.0 在系統感知能力與計算能力上的巨大提升,讓 Elon Musk 的確有理由相信,這代 Autopilot 會比上一代好得多。
實際上,在 Autopilot Hardware 2.0 推出后,特斯拉已經對外宣稱這版本的硬件足以支撐完全無人駕駛。
Autopilot 從 1.0 依靠 Mobileye 提供芯片和算法,轉型到 2.0 以后,在核心技術上基本能夠做到自主可控。這個變化背后,有一位靈魂人物就是芯片大師 Jim Keller。
Autopilot 軟硬件工程副總裁 Jim Keller,現已加盟 Intel
Jim Keller 在 2000 年以前參與了 AMD Athlon K7 的設計,之后又是 K8 架構的主要設計者,然后創業,公司又被蘋果收購。
Keller 加入蘋果之后,帶領團隊設計了 A4 和 A5 芯片,這兩款芯片被廣泛用于 iPhone 4、4S 和最初兩代的 iPad 上。之后他又回到老東家幫助 AMD 推出 Zen 架構芯片。
在 Jim Keller 加入特斯拉 1 個月后,公司又從蘋果招到了研發總監 Pete Bannon,Bannon 是 A5 芯片核心的設計工程師,在那之前他是 PA Semi 的架構與驗證副總裁。
PA Semi 也就是 Jim Keller 創業被蘋果收購的那家公司,Jim Keller 和 Bannon 是老同事。
當月,特斯拉 FSD 的研發正式啟動了。后續,特斯拉在 2016 年的上半年密集地招募了一大批原本在 AMD 進行芯片設計和深度學習研究的人才。
到 2019 年 3 月,FSD 在 Model S 和 Model X 上實現量產;4 月,FSD 在 Model 3 上量產。
搭載 FSD 的這版硬件,也就是大家通常所認知的 Autopilot Hardware 3.0。
2019 年 8 月,當特斯拉在高性能處理器頂會 Hot Chips 上公布 FSD 研發成果時,我們發現 FSD 的主創絕大部分都是來自 AMD。
(下面這張 PPT 上,除了 Pete Bannon,其他的主創人員在 AMD 平均有 15 年的開發經驗,Bill McGee 甚至在 AMD 待了 18 年。)
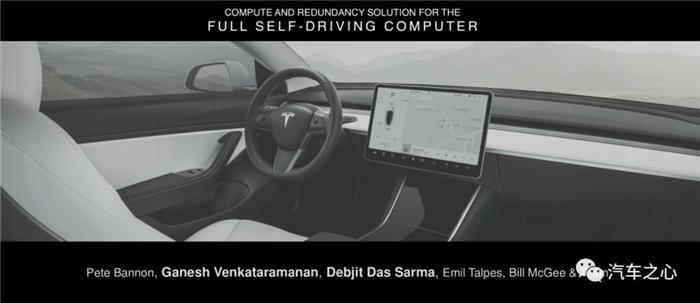
FSD 的核心開發人員
Pete Bannon 帶領的 FSD 項目與前面提到的谷俊麗帶領的機器學習小組,都匯報給 Autopilot 硬件工程副總裁 Jim Keller。
這樣,從 2015 - 2017 年,Autopilot 團隊逐步建立了自身在計算機視覺+AI+芯片的能力,特斯拉的自動駕駛系統也越發變成一個軟硬件緊密耦合的系統。
這樣做的好處是什么呢?就是高效。
Pete Bannon 在 FSD 量產后曾經說過,
「特斯拉開始研發 FSD 的原因是,我們發現市場上沒有一種芯片是從底層出發為自動駕駛和深度神經網絡設計的。
FSD 是我參與過的所有項目中最快地從設計到量產的。因為我們只聚焦于服務 1 個客戶的需求。」

Autopilot 團隊管理架構的演進

Autopilot 最早期的管理層是資深工程經理 Drew Gray,Gray 在 2013 年 10 月入職,是 Autopilot 招聘的第一個員工。
Gray 在 2015 年 9 月,也就是特斯拉 V7.0 發布的前夕,去了當時還在做后裝自動駕駛解決方案的 Cruise Automation,卻又在 Cruise 被通用收購的前夕去了 Otto,最后所幸趕上了 Otto 被 Uber 收購。Gray 在 Uber 時期擔任工程總監,現在則是創業公司 Voyage 的 CTO。
與 Drew Gray 接近的時期,特斯拉還有一位工程總監 Darren Liccardo,Liccardo 和 Gray 在特斯拉負責的主要是 Autopilot 1.0 系統的集成。Liccardo 后來去了大疆,據說與大疆布局自動駕駛有關。
2015 年上半年,因為要自研軟件逐步替代 Mobileye,Autopilot 開始組建視覺算法團隊 Vision。
Vision 團隊最初也由 Drew Gray 負責。一段時間后,Autopilot 從微軟招募了此前負責 Bing Vision 和 HoloLens 的研發總監 David Nistér,Nistér 擔任的是 Autopilot Vision 副總裁。
2015 年 12 月,在 Gray 和 Liccardo 離開后,特斯拉把原來 Model X 的首席產品經理 Sterling Anderson 調入,擔任 Autopilot 總監,Anderson 的角色更接近產品總監/項目總監。
2016 年 1 月,特斯拉又引入 Jim Keller,公司對 Keller 的任命是 Autopilot 硬件工程副總裁。Keller 的團隊一面著手設計完全無人駕駛芯片 FSD,一面于 2016 年 10 月推出搭載英偉達芯片的第二代自動駕駛硬件系統。
此外,Keller 麾下還成立了利用 AI 提升軟件算法的機器學習小組。
2015 年 - 2016 年,硬件工程副總裁 Jim Keller 與 Vision 副總裁 David Nister 以及 Autopilot 總監 Sterling Anderson 的搭班,是 Autopilot 第一版相對穩定的管理架構。
在這個架構下,芯片、計算機視覺、AI 這幾個日后關鍵的要素都已經萌芽。
在 2016 年 10 月以后,為了推動 Tesla Vision 盡快追趕上 Mobileye 軟件所提供的功能和性能,Vision 小組與機器學習小組在技術和產品上進行融合。
同時在軟件工程上,特斯拉借調了當時 SpaceX 的軟件工程副總裁 Jinnah Hosein,來兼任 Autopilot 臨時的軟件工程副總裁。

Aurora 創始人:Chris Urmson(左)與 Sterling Anderson(右)
2016 年底,Sterling Anderson 離開特斯拉,與前 Google 自動駕駛的 CTO Chris Urmson 創辦 Aurora.ai。
2017 年 1 月,特斯拉又從蘋果挖來了編程語言 Swift 的主要開發者 Chris Lattner,Lattner 的角色是 Autopilot 軟件工程副總裁。
隨著 Lattner 的到來,Jinnah Hosein 重回 SpaceX,而原來 David Nistér 的 Vision 團隊被來自蘋果的 Chris Lattner 接管。機器學習小組與 Vision 小組隨后合并,成為現在的 Autopilot AI 團隊。
從 2016 年下半年 - 2017 年上半年,在 David Nistér、Jinnah Hosein、Chris Lattner 和 Jim Keller 4 位副總裁的領導下,特斯拉 V8.1 的更新基本上恢復了此前全部的自動駕駛功能。
一個頗具戲劇性的結果是,前面的 3 位軟件副總裁,到 2018 年已經悉數離開了特斯拉。
SpaceX 的 Jinnah Hosein 加盟了 Anderson 創辦的 Aurora.ai。David Nistér 去了英偉達負責自動駕駛高精地圖業務。而 Chris Lattner 很快去了 Google,現在在開發 TensorFlow。
在 2017 年 6 月,Chris Lattner 離開之后,特斯拉進一步提拔了 Jim Keller 為總負責 Autopilot 硬件和軟件工程的副總裁。
同時,團隊內部當時機器學習小組的負責人谷俊麗向 Elon Musk 推薦了 OpenAI 科學家 Andrej Karpathy,Andrej 在 2017 年 6 月加入,擔任 Autopilot AI 總監,負責的就是此前 Vision 小組與機器學習小組合并的團隊。
這樣,在 Jim Keller 治下,Pete Bannon 主要帶領 FSD 的研發,Andrej Karpathy 主要負責 Vision 和 AI 的開發。這個局面是 Autopilot 第二版相對穩定的治理架構。
在 2017 - 2018 年,Jim Keller 帶領下的 Autopilot 團隊發展到 300 - 400 人。
除了 Pete Bannon 帶領的 FSD 開發,以及 Andrej 帶領的 AI 團隊外,Autopilot 還包含了規劃控制、地圖、仿真和測試等模塊。
到 2018 年 4 月,Jim Keller 離開特斯拉轉投 Intel,原來 Snap 的工程 VP Stuart Bowers 接了 Keller 的班,Autopilot 今天大致保持了 Jim Keller 時期的架構。
在 Jim Keller 的團隊之外,Autopilot 還有一支關聯團隊很少被人提及,就是 Firmware 團隊,有時也被稱為嵌入式團隊。
這支團隊有將近百人,負責包括車內大屏、數據采集、軟件 Build&Release 以及 OTA 等工作的開發。
這支團隊由特斯拉軟件工程副總裁 David Lau 帶領,Lau 是特斯拉元老級的成員。Firmware 團隊深居幕后,卻對 Autopilot 也至關重要。
從 Autopilot 1.0 到 2.0,特斯拉在自動駕駛上建立了自主可控、快速迭代的能力。盡管這個過程看起來極盡折騰,內部的團隊常常瀕臨「無人駕駛」的狀態,但 Autopilot 最終拿出了領先行業的量產功能。
Autopilot 短周期高強度迭代開發的過程,也培養了一大批自動駕駛領域的實戰人才。
除了先后投奔各家的高管,在中國公司的自動駕駛業務一線,小鵬汽車自動駕駛副總裁谷俊麗就是前面提到的在 Autopilot 2.0 開發時期發揮關鍵作用的機器學習小組負責人。
此外,蔚來汽車負責 NIOPilot 的副總裁 Jamie Carlson、紐勱科技 CEO 徐雷、原 Roadstar 聯合創始人衡亮以及 AutoBrain 的聯合創始人 Yolanda Du 也悉數出自 Autopilot 團隊。

特斯拉實現自動駕駛的路徑
2019 年 3 月,特斯拉已經開始量產 FSD,FSD 能夠以不到 100 瓦的功耗輸出 144TOPS 的算力。根據 Elon Musk 最近的一次承諾,特斯拉將在明年底在一部分市場推出完全無人駕駛的功能。
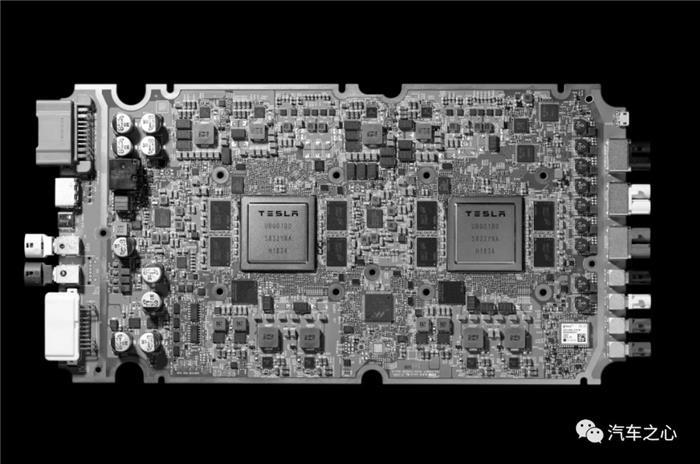
特斯拉自研芯片 FSD
Elon Musk 第一次公開談論解決完全無人駕駛的問題,是在 2015 年 3 月。
在當年 GTC 上,Musk 與黃仁勛這樣講道:「在我看來,無人駕駛的問題已經解決了。我們知道準確的技術實現路徑,未來幾年就能把它做出來。我們不僅要做無人車開發的領頭羊,而且要讓你真能買得到。」
次月,Autopilot Vision 團隊在特斯拉內部成立。同年特斯拉在 V7.0 更新中推送 Autosteer 功能。
到 2016 年 Q3,搭載 Autopilot 1.0 的特斯拉已經賣出 11.4 萬輛。
特斯拉可能是人類歷史上,第一次用聯網的汽車,以如此大的規模,配置完全相同的傳感器,采集相同格式的真實駕駛數據。
這些眾包采集的數據,在經過篩選清洗標注后,被用于訓練深度學習的算法,算法再被進一步封裝,以 OTA 的方式裝載到用戶車載計算機的芯片上。
數據 - 算法 - 更多數據 - 更優算法,是特斯拉實現完全自動駕駛的路徑。而其自研的 FSD,為 Autopilot 奠定了算力基礎,也讓這個路徑的實現成為可能。
回到 2014 年的秋天,當大部分人都認為廣泛的無人駕駛不會那么快到來時,Elon Musk 已經不想再等。
P.S. 本文部分內容首發于知識星球「汽車之心」:
https://t.zsxq.com/NbeyvJY
參考資料:
[1]https://lexfridman.com/tesla-autopilot-miles-and-vehicles/
[2]https://www.bloomberg.com/news/articles/2013-05-07/tesla-ceo-talking-with-google-about-autopilot-systems
[3]https://waymo.com/safety/
[4]https://www.youtube.com/watch?v=kp3ik5f3-2c
[5] 特斯拉 2014 年年報
[6] https://www.tesla.com/blog/tragic-loss
[7]https://www.tesla.com/blog/all-tesla-cars-being-produced-now-have-full-self-driving-hardware?redirect=no
來源:汽車之心
本文地址:http://www.155ck.com/news/qiye/106332
以上內容轉載自汽車之心,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號