寅家科技是一家全球化的高科技智能駕駛公司,多年深耕高精度傳感器、深度學習算法、控制決策技術,形成智能交互、自動駕駛系統集成、特定場景自動駕駛技術領域的成熟應用。基于堅實的技術基礎,寅家科技聚焦環境感知、智能決策、控制執行等領域,為客戶提供安全、高效的智慧出行解決方案。
寅家科技泊車事業部首席專家張皓磊以《全場景智慧泊車方案及視覺感知的行泊一體應用優勢》為主題展開演講,以下是演講內容整理:

寅家科技泊車事業部首席專家張皓磊
寅家科技的行泊一體技術發展之路
寅家科技成立于2013年,是集研發、生產、銷售、服務于一體的自主研發高新技術企業,獲得了專精特新“小巨人”企業稱號,主要產品覆蓋硬件、感知、算法、規控領域,提供高性能智能視覺、雷達感知硬件,領先的軟件算法,以及完整的軟硬件一體化解決方案、技術配套等全棧服務等,為客戶提供客制化的L2-L4級智能駕駛解決方案。
寅家科技建立之初主要聚焦感知硬件和感知算法服務,一步步從環視系統到全場景泊車,最終做到行泊一體,覆蓋遙控泊車、記憶泊車、代客泊車、高速道路和城市道路行車等不同場景應用。
寅家科技行泊產品的整體規劃主要劃分為兩類,第一代行泊產品于2023年推出,是基于L2級 ADAS自動駕駛輔助系統的行泊一體和全場景泊車。第二代產品會在2024年推出,屬于L4級行泊一體的產品,包含2D、3D環視全景,自動泊車功能、代客泊車、記憶泊車、影子系統、高精地圖等服務,以及屬于L4級別的高速公路引導,城市道路引導,自動上下匝道,變道超車等功能也做了對應研發部署。
目前寅家科技的自動泊車主要是向較近距離的物理車位進行泊車,采用駕駛員跟車監督的形式。但是技術演進至遙控泊車、記憶泊車以及AVP泊車之后,車位就不再局限于物理車位,而是會變成抽象的記憶存儲車位,或者云端車位的模式。駕駛員的角色也會從主動監督向無監督、甚至手機操控的模式轉變。行車的距離控制也會從APA泊車的3-5米,到RPA的10米以內,再到記憶泊車的1公里以內,未來演進至AVP泊車,距離還會進一步延長。可以說,伴隨行泊一體技術的不斷升級,泊車場景也在不斷拓展。
那么升級后的全場景泊車能解決什么樣的痛點?首先是可以幫助到對倒車入庫、側方停車等技術不太熟練的駕駛員解決基本的停車尷尬。其次,更加一層安全保護,在泊車過程中當面臨光線較暗、視野盲區有行人/動物闖入,相比初級駕駛員,自動泊車系統會有更完備的預測和處理機制。從資源利用的角度去說,人類駕駛員大多處于盲停,也就是不清楚哪里有車位,即開即停的狀態,如果使用具備大數據匹配篩查能力的自動泊車,就可以一定程度上提高車位整體利用率,也可以緩解亂停亂放導致的道路擁堵。
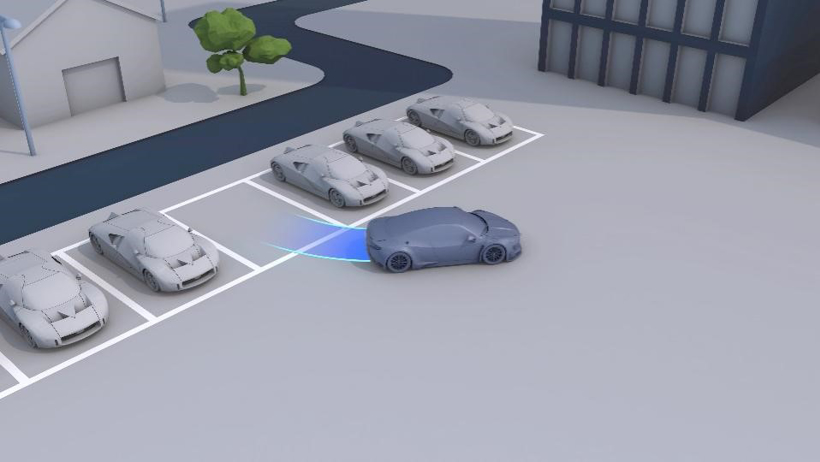
圖片來源:寅家科技
此外,在車主找車時,寅家科技會提供AR尋車功能,配套汽車周圍環境的環視全景拼接圖片,幫助車主更快地找到對應車輛。
寅家科技的自動泊車產品線覆蓋了高中低不同等級的配置,目前性價比較高的是環視系統和超聲波雷達組合,以及對于感知、定位、路徑規劃、車身環境的深度學習算法應用。在中高端則采用是4D毫米波雷達、激光雷達等,同時仍然在通過不斷的數據閉環做算法迭代和升級,力求使用更小的算力實現更全面的功能。
寅家科技行泊一體2.0的視覺應用優勢
接下來是寅家科技行泊一體 2.0的視覺應用優勢,行泊的整體視覺環境不再局限于四枚環視攝像頭,自動駕駛前主攝像頭和其他補盲攝像頭也會加進“融合AVM”功能中,加強了對車身周圍所有目標的感知識別、跟蹤預測,更有助于高級別自動駕駛的應用。
行泊一體的整體視覺感知系統需要滿足三項功能需求:第一,需要對車身周圍行人、車輛,其他障礙物進行檢測、標識和跟蹤。第二,實現對道路環境的檢測,比如車道線,車道信息,紅綠燈信息、路標信息等。第三,對可駕駛區域進行分割。第四,SLAM定位與建圖。
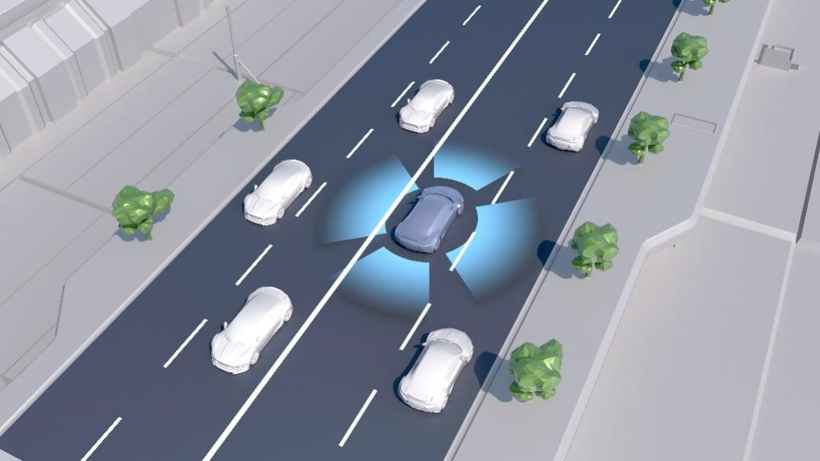
圖片來源:寅家科技
以上四項功能中,SLAM建圖與車周障礙物定位有兩點特別值得關注:
一是地圖特征的采集與建圖。駕駛員開車進入地庫,在沒有高精地圖支持的情況下,首先需要自己手動掃圖,針對這一點,寅家科技行泊一體 2.0會對地圖,特別車輛行駛前向地圖的可視范圍內特征點進行掃描,采集車身行駛參數,如輪速、方向盤轉角、IMU等綜合信息,用來建立所有特征點的運動模型,利用這些數據建立特征點運動模型,在車輛行駛過程中,使用運動模型對特征點軌跡進行動態預測,獲取權重更高的特征粒子構成地圖要素與完整的SLAM地圖。
此外,由于相似的特征點越多,地圖的構建精度就越差,因此在相似度過高的情況下,系統會抓取更多特征點,以此提升整個地圖的精度和銳利度,在最后則會整合所有特征點的運動軌跡單獨成圖。
二是BEV感知內的空間特征融合。BEV感知與環視領域內的鳥瞰圖有一定相似性,但范圍更廣,相比鳥瞰視圖還囊括了汽車行駛前向視角主攝像頭的領域,會整合感知區域、車身原點坐標、時間軸進行一個4D虛擬化的時空同步輸出。
目前,寅家科技行泊一體 2.0主要使用Transform做BEV圖像的輸出投影,未來還會融合激光雷達、毫米波雷達、點云等多維度的感知信息,進一步提高自動駕駛環境感知的一致性、安全性和即時性。
(以上內容來自上海寅家電子科技股份有限公司泊車事業部首席專家張皓磊于2022年9月15日由蓋世汽車主辦的2022第五屆自動駕駛與人機共駕論壇發表的《全場景智慧泊車方案及視覺感知的行泊一體應用優勢》主題演講。)
來源:蓋世汽車
作者:薈薈
本文地址:http://www.155ck.com/news/qiye/185703
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號