作者 | 德新
編輯 | 王博
1. 全球無人駕駛大洗牌,Robotaxi越發向頭部聚集
全球無人駕駛落地正呈現兩幅面孔。隨著資本熱潮褪去,一部分公司在資金和研發上已經難以為繼,Robotaxi落地的資源和希望,正無限向頭部公司聚集。
10月,Argo宣告關閉,員工將分流至福特和大眾,并轉向量產自動駕駛的研發;
9月,Aurora Innovation尋求出售,目前市值已跌至15億美元,不足其鼎盛期的1/10;
ZOOX賣身亞馬遜之后,一部分研發轉向無人配送,而今年又有消息傳出,亞馬遜關閉了部分無人配送項目。
假如把L4無人駕駛比喻成一座山峰,過去五六年間涌現的那些技術公司們,正在進入更難更險的路段。
觀察頭部公司們的表現,實現「無人化」的突破是一個關鍵的分水嶺。那些跨過「無人化」的公司仍在快速挺進,與行業中的裁員、關停呈現完全不同的一番景象。
Waymo近期獲得加州CPUC批準在舊金山、灣區部分城市等區域向公眾提供無人駕駛網約車服務;并且宣布了和極氪合作的新進展,基于概念車ZEEKER M-Vision打造量產車,車型將在2024年具備量產條件。
繼今年早些發布量產車Apollo RT6之后,百度也在本周舉行Apollo Day,第一次完整系統地向外界闡述了Robotaxi無人化落地新階段的思考。多位技術大牛,分享了大量百度在過去十年中的珍貴經驗和獨到的技術判斷。
百度也宣布,2023年將擴大業務規模,在更多區域開展全無人自動駕駛運營,著力打造全球最大的全無人自動駕駛運營服務區。
浪潮滾滾向前,頭部公司們吹響了Robotaxi大規模落地的沖鋒號。
2. Robotaxi 2.0時代:百度Apollo的技術判斷
本屆百度Apollo Day的一大看點,是百度Apollo以及百度研發體系的多位大牛集體登場。
更精彩的部分是基于百度的AI、計算機視覺、地圖等的技術體系,Apollo的思考和技術判斷。
非官方的說法是,這是一場「價值百萬」的技術分享。以百度十年千億級的研發投入來說,這場分享價值百萬毫不為過。
我們先從陳競凱的分享講起,他首先綱領性地拋出了Apollo的幾個技術選擇:
工程化的技術體系
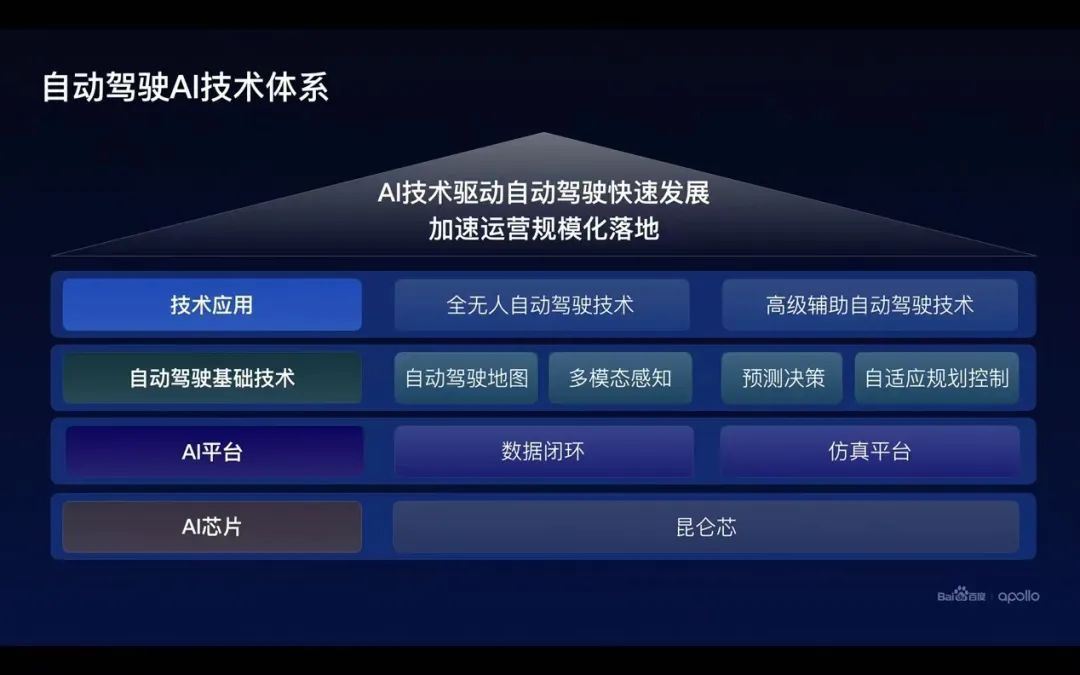
打造能大規模落地的Robotaxi,核心是搭建安全、可規模化、智能高效的自動駕駛系統。從系統設計上有兩種思路:一種是偏向學術派的,統一建模、端到端的解決方案;另一種是工程導向的,做系統拆分,逐個突破。
端到端的解決方案存在很大的不確定性,雖然技術發展迅速,但到底在未來兩年還是十年能取得突破仍是未知的。目前百度Apollo的技術搭建仍然沿著工程化的思路,將車載體系大致分為:地圖、感知、預測決策、規劃控制四個大塊。
高精地圖不是阻礙,而是助力
行業今年提出了「重感知、輕地圖」的思路,原因是地圖資質難、成本高、難獲取。而百度認為高精地圖≠高成本的阻礙,難點在于車輛第一次通過已經變更的現實世界時,如何安全通過,解決方案是實時地圖與離線高精地圖的融合。
多模態前融合感知,而非純視覺
以特斯拉為代表,行業今年在傳感器選擇上出現了較大分歧。百度的判斷是,充分發揮各傳感器的優勢,并且在發展過程中將后融合方案轉為前融合方案。
學習型PnC是實現全無人的必由之路
百度最初的預測和決策是分立的兩個系統模塊。預測由數據驅動,而決策規劃控制是基于規則的方案。規則系統的問題是隨著系統迭代,策略分叉導致投入產出比越來越低,且面對城市擴張、場景變化時,不僅需要分支節點的調整,而是需要從主干到分支的全面調整,基于規則的PnC是難以規模化的。
因此,百度的思路以漸進的方式,以學習型的系統來吸收規則系統,數據驅動PnC的迭代,同時規則也作為安全的兜底。
數據是仿真系統的靈魂
仿真系統的價值不僅是針對單一場景進行模擬,而是對每次迭代帶來的系統表現變化進行完整的評價。
因此仿真系統結合大規模的數據分布來構建是必須的,數據是仿真系統的靈魂。將真實世界事件發生的概率與仿真掛鉤,才能在仿真系統一個相對扭曲的分布中,獲得更準確的對系統能力的度量。
3. 邁向全無人:Apollo的核心技術支柱
隨著百度在重慶、武漢開展全無人的商業運營試點,以及Apollo RT6的量產推進,百度下一階段的目標是:持續擴大業務規模,在更多區域開展全無人運營,打造全球最大的全無人駕駛運營服務區。
Apollo Day上也展示了面向更大范圍的無人化,百度Apollo當前幾個關鍵的技術支柱。
3.1 輕成本、重體驗的地圖,是L4系統達到99.99%的關鍵
當下「重感知、輕地圖」的趨勢,是一種從成本出發的技術主張。而百度Apollo堅定認為只有用上了高精地圖,L4自動駕駛才能達到99.99%的成功率。比如當道路標識出現遮擋、污損、新舊重疊時,單靠實時感知無法應對。
Apollo的勇氣來自于,百度是行業內唯一一家既懂地圖又深耕自動駕駛的公司。
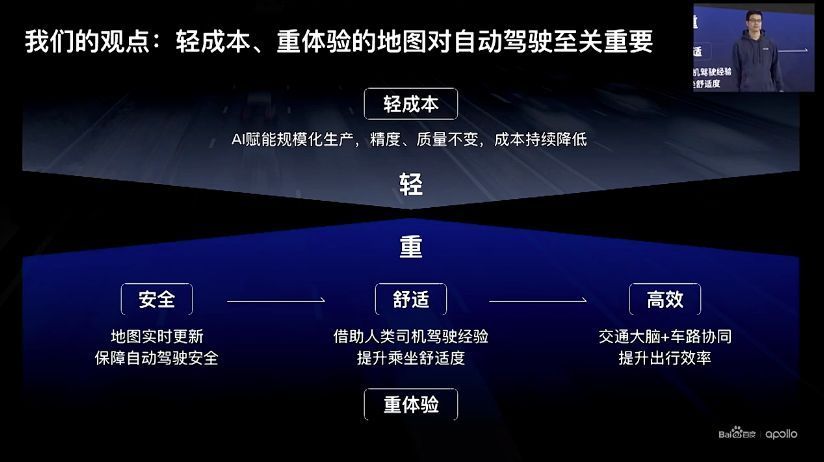
高精地圖要大規模應用,首先要降本。從百度的經驗看,2020 - 2022年Robotaxi高精地圖單公里生產成本逐年明顯下降。目前,百度高精地圖構建自動化率達到96%。
大規模地圖生產的難點是自動化的數據融合,關鍵是融合的絕對/相對精度要達到厘米級。在數據融合上,百度做了3方面的技術創新:多層級的圖優化;場景化關聯和匹配;以及基于學習的匹配算法。
其次是提升體驗。
百度地圖本身有超過1200萬公里的路網覆蓋,日均20億公里的軌跡數據,通過向數億的司機學習,形成全路網級的駕駛知識圖譜。這個圖譜包括:行駛速度、變道時機、變道軌跡等等。這一層輸入,是自動駕駛由笨拙變得順滑的關鍵。
第三是通過百度地圖和智能交通技術,提高通行效率。
3.2 文心大模型,2.0時代的多模融合感知體系
「大模型,已經成為自動駕駛能力提升的核心驅動力。」這是王井東的觀點。
百度Apollo自動駕駛感知1.0,是以激光雷達為主,加入環視、毫米波的后融合感知方案,后融合是以規則驅動的,因此泛化能力不夠。
感知2.0是多模態、前融合、端到端的方案為主;除此之外,補充以遠距離的視覺感知以及近距離的魚眼感知。大模型在其中發揮的作用,包括數據挖掘、數據標注等等。
自動駕駛有幾類典型難題:
· 遠距離物體感知;
· 激光雷達升級點云變化,引發的數據重標注挑戰;
· 長尾數據挖掘,比如異形車、行人、低矮物體等;
文心大模型的應用,主要是用大模型提升車載小模型的感知能力;并且可以利用弱監督預訓練的方式挖掘長尾數據。
自動駕駛數據集中,2D數據容易獲取,3D數據獲取相對困難。可以利用2D標注數據和3D標注數據,迭代自訓練的方法得到一個效果不錯的感知大模型,再利用大模型對數據進行3D的偽標注,同時使用模型蒸餾的方法,獲得感知效果比較好的小模型。
3.3 高提純、高消化的數據閉環是如何設計的?
無人車跑得越遠,會遇到各種意想不到的場景,比如羊群過馬路。解決罕見、長尾場景,是數據閉環的價值。與感知、規控、決策的技術棧相比,大規模數據閉環的建設是行業里的嶄新命題。
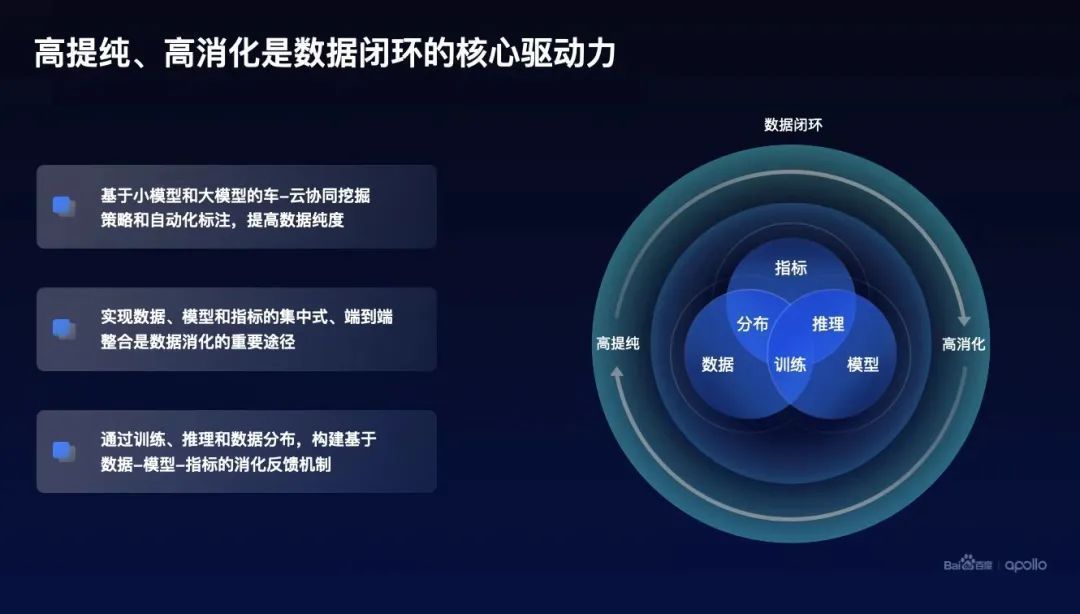
數據閉環的前半是大量數據帶來的存儲和標注的壓力,后半是大規模數據用于訓練的計算量需求暴增。百度Apollo設計的數據閉環,核心是解決「高提純、高消化」的問題。
在數據提純上,百度的方案是利用車端小模型+云端大模型,做高效的挖掘和自動化標注;數據消化架構,實現自動化訓練,具備聯合優化和數據分布理解的能力,利用高純度的數據進一步提升自動駕駛系統的整體智能水平。除此之外,訓練、推理以及數據分布在數據消化過程中,形成有效的反饋機制,進一步提升數據消化的整體效率和效果。
3.4 L4與L2+共生,百度的獨家秘技
百度是行業內第一家同時具有L4 Robotaxi技術和量產L2+輔助駕駛方案的公司。
其內部的判斷是:2023年具備城市道路輔助駕駛能力的產品上市后,會帶動C端用戶需求,并在2025年引發消費者對高階輔助駕駛/自動駕駛的需求爆發。
百度的L2+ 領航輔助駕駛產品ANP 3.0 將在2023年夏天在首家客戶的車型上量產上市,支持復雜城市道路場景,并且銜接融通高速和泊車場景。
ANP 3.0的硬件是雙Orin-X芯片,部分配置800萬像素攝像頭,搭載半固態激光雷達。從技術特點來講,ANP 3.0的視覺感知和激光雷達感知,是兩套獨立運行、低耦合的系統。
背靠百度Robotaxi的數據積累,ANP 3.0在BEV的數據供給上有先天優勢,融合LiDAR信息的L4感知結果可以作為BEV模型的標注數據,直接用于模型預訓練。目前,百度Robotaxi的累計里程超4000萬公里。
其次ANP使用了一套為智駕規模化輕地圖方案,提升安全,也降低制圖成本。
百度內部認為實現無人駕駛商業化的最佳路徑是:
前期在限定區域實現技術積累,通過技術降維和L4數據,為L2+產品做熱啟動;
更長期看,利用L2的規模優勢,提前收集L4泛化所需要儲備的長尾問題。
內部預期未來3 - 5年內,百度領航輔助駕駛產品搭載量有望突破百萬,百萬級的車輛營造的數據壁壘也將有效成為L4的技術護城河。
3.5 One more thing:自研昆侖芯片
目前,百度自研的昆侖芯片已經量產了兩代,實現數萬片的商業化部署。第三、第四代產品都在研發中,三代芯片預計明年量產,四代芯片后年量產。

作為一款云端通用人工智能計算處理器,昆侖芯CEO歐陽劍介紹,昆侖芯主要是幾大優勢:是業界為數不多大規模部署的AI芯片,具備完善的生態,靈活易用。
自動駕駛的業務和模型算法復雜度不亞于數據中心,而昆侖在數據中心積累的優勢可以很好地移植到自動駕駛上。
目前昆侖芯二代已經在百度的Robotaxi系統上進行了完整的適配,并開始道路測試。
4. 什么樣的公司有望無人駕駛落地的勝利?
今年無論是特斯拉的AI Day,還是百度的Apollo Day,眾多科技公司的開放日都變得極其技術化。
一方面,面對自動駕駛、機器人這些尖端前沿的話題,行業公司嘗試開放一部分的思考加速整個行業的技術推進;另一方面,公眾對無人駕駛的商業應用、技術實現和使用體驗也逐漸顯露出了濃厚的興趣。
無人駕駛/自動駕駛/高階輔助駕駛的落地,是安全、成本、體驗的極致平衡。與無人駕駛相比,輔助駕駛更重成本和體驗;而無人駕駛首重安全和成本。
一位業內人士評價:L2與L4之爭,好比是飛機和火箭。L2進階,飛機越飛越快、越飛越遠,但仍然難以到達月球,這是本質上架構設計的不同。頭部的L4公司已經淌過了近10年的坑,在無人駕駛落地上將持續領先。
目前L4 Robotaxi已經可以在國內的部分城市在特定區域,可以開展無人化的商業運營,下一階段的難點是:成本下降和規模部署。
好消息是:
成本下降,已經點連成線。依托輔助駕駛的大規模量產,在關鍵零部件上激光雷達、大算力芯片的成本已經大幅下降。以百度為例,第六代量產無人車Apollo RT6成本僅為25萬元,相當于一輛普通新能源汽車的價格。
法律法規也逐漸開放。重慶、武漢落地無人化試點,北京在本月開放了前排無人,深圳試點L3立法,廣深發放首批城市高精地圖許可。
什么樣的公司能迎來無人駕駛落地的勝利?要有雄厚的資金資源實力持續投入;體系化的AI能力積累;工程能力與對汽車安全的深入理解。
過去一年,百度蘿卜快跑的運營范圍遍及北京、上海、重慶、武漢等10多個城市,超過了Waymo等廠商,成為全球最大的自動駕駛出行服務提供商。
蘿卜快跑累計訂單量達到140萬單,上個季度公眾累計乘車47.4萬次;在部分地區,單車每日完成15次以上出行服務,已經與傳統網約車服務相當接近。
無人駕駛在技術研發上遇到的問題越來越難,頭部公司也越發看到勝利的曙光。
來源:第一電動網
作者:HiEV
本文地址:http://www.155ck.com/kol/190352
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!







 京公網安備
11010502033163號
京公網安備
11010502033163號