「特斯拉端到端智駕方案到底是怎么做的?」
在一次端到端智能體研討會(huì)上,有人向一眾端到端專家學(xué)者們拋出疑問。
現(xiàn)場(chǎng)包括趙行(清華交叉信息研究院助理教授)、許春景(華為車 BU 智駕 AI 首席科學(xué)家)、王乃巖(小米智駕杰出科學(xué)家)、賈鵬(理想算法研發(fā)副總裁)這些學(xué)界、業(yè)界人士在內(nèi),沒人能給出確切回答。
沒有人清楚,特斯拉 FSD V12 具體模型架構(gòu)是怎樣的,但特斯拉就是憑一己之力,攪動(dòng)了端到端的潮水。
我們?cè)噲D從馬斯克發(fā)言和特斯拉動(dòng)態(tài)中拼湊出特斯拉端到端的大致體征:從感知到?jīng)Q策由統(tǒng)一神經(jīng)網(wǎng)絡(luò)控制,很大可能基于生成式 AI,在原有 Occupancy 模型基礎(chǔ)上構(gòu)建世界模型。
但從中捕捉的確定性是,端到端方案對(duì)于云端算力的需求來到一個(gè)新高潮。
正如馬斯克多次表示:「FSD V12 端到端模型迭代主要受到云端算力資源的掣肘。」
于是,特斯拉選擇重金堆算力,計(jì)劃 2024 年底前對(duì) DOJO 超算中心投資超 10 億美元,目標(biāo)是總算力提升至 10 萬 PFLOPS。
如果說算力是端到端的必要條件,那這意味著,端到端正在掀起新一輪軍備競賽,贏家往往是大力出奇跡者。
同時(shí),正如無人知曉特斯拉端到端具體如何實(shí)現(xiàn)一樣,大家只是瞄準(zhǔn)了潮水涌動(dòng)的方向,一股腦向那涌去。
于是,忽如一夜春風(fēng)來,端到端方案遍地開,誰都跟緊節(jié)奏,不想因此出局。
01、端到端智駕,大「力」才能出奇跡
端到端智駕,基于 AI 模型化的主路徑,對(duì)其訓(xùn)練算力資源的超大需求,勢(shì)必助長了算力燃燒的火焰。
智算中心進(jìn)入了跑馬圈地時(shí)代,一場(chǎng)關(guān)乎算力的競賽就此展開。
這邊,特斯拉、長安、吉利等車企都不遺余力地籌備智算中心,或選擇自建,或選擇與第三方合作。
特斯拉的 DOJO 智算中心,預(yù)計(jì)到 2024 年 10 月,總算力將達(dá)到 100EFLOPs(10 萬 PFLOPS),相當(dāng)于約 30 萬塊英偉達(dá) A100 的算力總和。
國內(nèi)車企也在算力上奮力追趕,吉利、長安,以及新勢(shì)力「蔚小理」,都沒掉隊(duì)。
值得一提的是,蔚來與騰訊合作建立智算中心,雖然暫未公布其超算中心的具體實(shí)力,但李斌曾用「喪心病狂」一詞來形容蔚來在算力方面的布局,并稱在未來一兩年內(nèi)都還會(huì)是全球天花板。
那邊,以華為、商湯絕影、毫末智行為代表的智駕供應(yīng)商,也絲毫不占下風(fēng)。
華為車 BU 云智算中心的乾崑 ADS 3.0,在算力方面已達(dá)到 3500PFLOPS,訓(xùn)練數(shù)據(jù)量為日行 3000 萬公里,按照全球道路總長約為 6400 萬公里計(jì)算的話,2.1 天系統(tǒng)就能完全覆蓋。
而商湯科技在最新財(cái)報(bào)中顯示,其智算中心 GPU 數(shù)量達(dá)到 4.5 萬張,總體算力規(guī)模為 12000PFLOPS,相較于 2023 年初提高了一倍。以及毫末智行聯(lián)合火山引擎推出的智算中心「雪湖·綠洲」,算力高達(dá) 670PFLOPS。
顯然,智算中心的建設(shè)已成為端到端自動(dòng)駕駛的標(biāo)配,對(duì)于算力的需求正在以一種倍極速率瘋狂增長。
「沒有智算中心的端到端智駕企業(yè)是不合格的。」毫末智行一位專家直言,算力越多,對(duì)模型的迭代效率、迭代方式速度,以及各種情況的修復(fù)效率,均有大幅提升。
商湯絕影智能駕駛副總裁石建萍也表示,高算力,意味著它所容納的應(yīng)用空間是廣泛的,它允許更多的嘗試、試錯(cuò)發(fā)生,那么就更有可能研發(fā)出性能更強(qiáng)的端到端模型。
那這是否意味著實(shí)現(xiàn)端到端智駕,必須大力才能出奇跡?
有意思的是,針對(duì)這個(gè)答案,行業(yè)呈現(xiàn)了兩種發(fā)展路徑:
一面是傾向于重投算力的「暴力計(jì)算」;
另一面是深耕算法的「工匠主義」。
誠然,行業(yè)對(duì)于智駕三要素(算法、數(shù)據(jù)、算力)的共識(shí)是三者相輔相成,任何一個(gè)出現(xiàn)短板,都會(huì)引發(fā)水桶效應(yīng)。
但在此基礎(chǔ)上,三個(gè)長板,哪方面現(xiàn)在需要重點(diǎn)強(qiáng)化,則出現(xiàn)了一些分歧。
暴力計(jì)算者認(rèn)為,現(xiàn)在各家算法其實(shí)沒有本質(zhì)區(qū)別,核心點(diǎn)在于把數(shù)據(jù)在超算中心中如何高效訓(xùn)練起來。
一位行業(yè)人士就指出,在學(xué)界已經(jīng)公開了可行的端到端算法架構(gòu),甚至不斷更新前沿進(jìn)展的情形下,業(yè)界完全可以參照學(xué)界的研究成果進(jìn)行量產(chǎn)、落地實(shí)驗(yàn),那么這就要求其現(xiàn)階段在算力基礎(chǔ)、數(shù)據(jù)規(guī)模上積攢足夠?qū)嵙Α?/span>
但也有另一種聲音夾雜在其中。他們認(rèn)為,實(shí)現(xiàn)端到端智駕,深耕算法是當(dāng)前更為緊迫的突破方式。
元戎啟行就對(duì)汽車之心表示,算力中心比拼只是一方面,但現(xiàn)階段更重要的是打造一套滿足 Scalling law 的網(wǎng)絡(luò)模型。
Scalling law 即規(guī)模定律,隨著模型規(guī)模的增加(包括參數(shù)數(shù)量、數(shù)據(jù)規(guī)模和計(jì)算資源),模型的性能也會(huì)相應(yīng)提高。
也就是說,想要規(guī)模定律生效,需要先謀定的是模型優(yōu)化問題,這才是后續(xù)大力出奇跡的發(fā)力點(diǎn)所在。
說到底,兩種路徑無關(guān)絕對(duì)優(yōu)劣之分,畢竟各家的端到端戰(zhàn)略規(guī)劃、資本實(shí)力各不相同。
但從特斯拉、華為等頭部車企都重投超算中心的動(dòng)作評(píng)判,算力愈高,端到端智駕效果的天花板的確會(huì)隨之抬高,也就是上限會(huì)有所提升。
那么,超算中心到底多大的算力能夠支撐起端到端智駕?
在辰韜資本發(fā)布的《端到端自動(dòng)駕駛行業(yè)研究報(bào)告》(以下簡稱「報(bào)告」)中顯示,大部分公司表示 100 張大算力 GPU 可以支持一次端到端模型的訓(xùn)練,但這大概率支撐不了方案走到量產(chǎn)階段。
毫末智行認(rèn)為,基于算法需要不斷迭代,端到端起步需要 1000 張 GPU。
但至于上限如何衡量,卻沒有定論。
行業(yè)一致認(rèn)為,量力而行。畢竟巨頭特斯拉橫亙?cè)诒姸噙x手面前。
據(jù)悉,特斯拉今年計(jì)劃將英偉達(dá) GPU H100 增加至 85000 張以上,達(dá)到和谷歌、亞馬遜同一量級(jí),這是國內(nèi)企業(yè)望塵莫及的程度。
畢竟,一張 H100 目前售價(jià)在 2.5 萬-4 萬美元之間,相當(dāng)于特斯拉今年至少要投超 20 億美元。
沒有雄厚家底,這不是誰都「玩」的起的。因?yàn)樘厮估氖姑谟诰呱碇悄艿娜蚧淠繕?biāo)還包括 Robotaxi、智能機(jī)器人等,解決問題的難度涉及到一個(gè)新的階層。
因此,特斯拉這般大動(dòng)作,是基于財(cái)力、目標(biāo)、數(shù)據(jù)規(guī)模的適配,其它企業(yè)沒必要向它看齊,追求一味的超高算力。
對(duì)于國內(nèi)智駕企業(yè)而言,眼下目標(biāo)是解決城市 NOA 量產(chǎn)落地,實(shí)現(xiàn)高階自動(dòng)駕駛。
毫末智行表示,要實(shí)現(xiàn)全國都能開,2000-5000 張 GPU 已經(jīng)足夠。
但隨著目標(biāo)的不斷進(jìn)階,從 L2 到 L3、L4,甚至 L5,算力需求將會(huì)繼續(xù)水漲船高。
無論如何,端到端的浪潮,的確推動(dòng)了一場(chǎng)新的洗牌運(yùn)動(dòng),無論是數(shù)據(jù)規(guī)模、算法結(jié)構(gòu)還是算力要求,都將掌握技術(shù)核心的企業(yè)洗到了最前面。
02、端到端迷局:誰才是真端到端?
端到端熱潮正在造就新一場(chǎng)網(wǎng)絡(luò)迷因。
誰都想搭上端到端的快車,就算技術(shù)沒跟上,宣傳高地也必須占領(lǐng)。
有意思的是,在「你也是端到端,我也是端到端」的情形下,很難把真?zhèn)蔚呐菽疗啤?/span>
究其根本在于,端到端實(shí)現(xiàn)路徑尚未統(tǒng)一,各家都有發(fā)言權(quán)。
現(xiàn)在對(duì)于端到端的定義可以區(qū)分為廣義與狹義。
廣義強(qiáng)調(diào)端到端是信息無損傳遞,不因人為定義接口產(chǎn)生信息損耗,可以實(shí)現(xiàn)數(shù)據(jù)驅(qū)動(dòng)的整體優(yōu)化。
而狹義的端到端只強(qiáng)調(diào)從傳感器輸入到規(guī)劃、控制輸出的單一神經(jīng)網(wǎng)絡(luò)模型。
也就是說,只要滿足廣義標(biāo)準(zhǔn),都能稱之為端到端,因此能看到各家端到端智駕企業(yè),從輸入到輸出的實(shí)現(xiàn)形式具有差異化,現(xiàn)在主流方案有以下三種:
一是感知認(rèn)知模型化。將大模型拆分為感知與認(rèn)知(預(yù)測(cè)決策規(guī)劃)兩個(gè)階段,串聯(lián)二者做訓(xùn)練。以華為乾崑 ADS 3.0 為代表,其感知部分采用 GOD 大感知網(wǎng)絡(luò),認(rèn)知部分采用 PDP 網(wǎng)絡(luò)實(shí)現(xiàn)端到端一張網(wǎng)。
二是模塊化端到端。將智駕的所有模型串聯(lián)在一起,用高端的方式統(tǒng)一訓(xùn)練。以 OpenDriveLab 的 UniAD(2023)為代表,通過跨模塊(感知預(yù)測(cè)規(guī)劃)的梯度傳導(dǎo)完成全局優(yōu)化。
三是單一神經(jīng)網(wǎng)絡(luò)。也就是狹義端到端概念。用一整個(gè)囊括輸入到輸出端的大模型,直接進(jìn)行訓(xùn)練。以 Wayve 為代表,其生成式世界模型 GAIA-1、視覺-語言-動(dòng)作模型 LINGO-2 可能是未來 One Model 端到端的重要基礎(chǔ)。
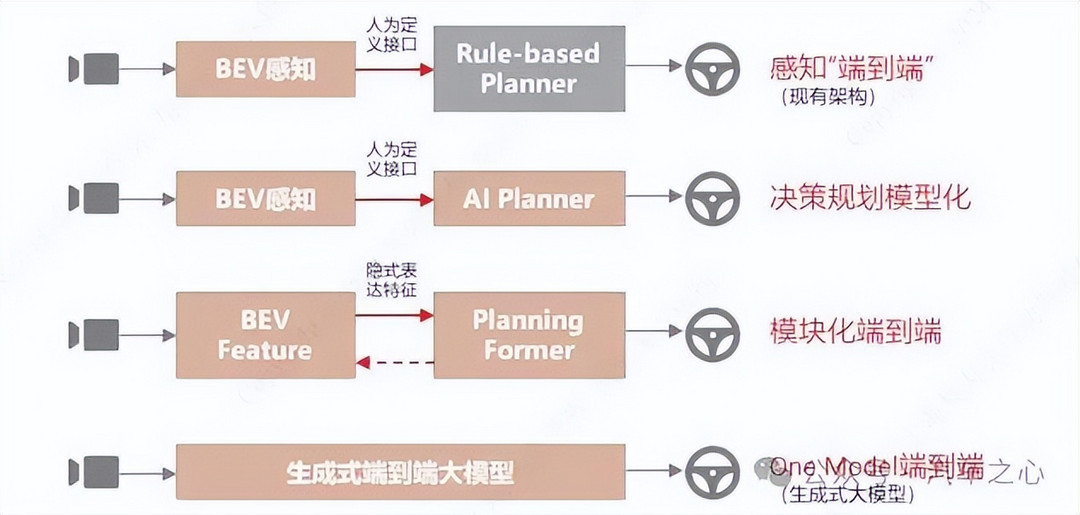
值得一提的是,要跟緊端到端潮流的轉(zhuǎn)向,站在傳統(tǒng)規(guī)則算法之上的企業(yè)一時(shí)無法推翻重來,于是他們遵循了一條遞進(jìn)式的技術(shù)路徑。
報(bào)告中也明確標(biāo)明了自動(dòng)駕駛架構(gòu)演進(jìn)的四個(gè)階段:感知「端到端」、決策規(guī)劃模型化、模塊化端到端、單一模型(One Model) 端到端。
圖源:辰韜資本《端到端自動(dòng)駕駛行業(yè)研究報(bào)告》
也就是說,從感知端模型上車,再進(jìn)行規(guī)劃模型化,最后串聯(lián)起來做端到端訓(xùn)練。這是一種相對(duì)平滑的過渡形式。
蔚來智能駕駛研發(fā)副總裁任少卿同樣認(rèn)為,自動(dòng)駕駛的大模型需要拆解成若干個(gè)層級(jí),第一步是模型化,行業(yè)基本完成了感知模型化,但是規(guī)控模型化方面頭部公司也沒有完全做好,第二步是端到端,去掉不同模塊間人為定義的接口,第三步是大模型。
當(dāng)然,通往端到端的路徑既可以平滑過渡,也可以推倒重來。
小鵬就在 AI DAY 上就強(qiáng)調(diào)自己卸下包袱,落地端到端大模型。
毫末也提到,「如果具備足夠勇氣和決心去重構(gòu)一套系統(tǒng),效率可能會(huì)更高一些。」
所以選擇何種路徑,何種方式,全憑自家結(jié)合實(shí)際條件考量。
但綜上來看,由于各家實(shí)現(xiàn)路徑、實(shí)現(xiàn)進(jìn)度、宣傳力度均不一致,的確造就了端到端眾說紛紜的迷局。
一個(gè)尷尬點(diǎn)是,當(dāng)嘗試從一些明顯特征判別真?zhèn)味说蕉藭r(shí),會(huì)發(fā)現(xiàn)都行不通。
比如 BEV+Transformer 架構(gòu),很多企業(yè)將其視為感知模型化的標(biāo)配,但這不代表一種綁定關(guān)系。只能說,這是當(dāng)下在感知模型上一種較好的實(shí)現(xiàn)方式。
以及特斯拉的純視覺路線,與華為的激光雷達(dá)融合路線,都可以稱為端到端,這僅是不同企業(yè)的路線選擇。
盡管有企業(yè)強(qiáng)調(diào),不擺脫高精地圖,無法做端到端模型。
但更多聲音還是更傾向于二者之間沒有絕對(duì)聯(lián)系。
石建萍強(qiáng)調(diào),去高精地圖,不是端到端的一個(gè)前提條件。盡管現(xiàn)在商湯做到了「無圖」,但為了交互更友好,也準(zhǔn)備把導(dǎo)航地圖加進(jìn)去。
尤其,結(jié)合模型訓(xùn)練復(fù)雜性、量產(chǎn)落地的安全性、端到端方案成本等多因素考量,純視覺還是激光雷達(dá)路線,都是各家企業(yè)的技術(shù)選擇。
而這些無法論證端到端的根源在于,端到端智駕強(qiáng)調(diào)的是結(jié)構(gòu)上的梯度可傳導(dǎo)以及全局優(yōu)化,這僅是一種訓(xùn)練方式。
它會(huì)經(jīng)常和另一個(gè)詞「大模型」混淆在一起。
行業(yè)人士都一致指明,這是兩個(gè)不同維度的概念,大模型關(guān)注的是模型的參數(shù)數(shù)量以及涌現(xiàn)能力。目前大模型為端到端實(shí)現(xiàn)提供了解決方案,但端到端并非必然基于大模型實(shí)現(xiàn)。
那么,回歸到最初的疑問,真假端到端到底怎么看?
答案是,要么扒代碼,要么看體驗(yàn)。
前者看它代碼到底怎么編寫,是否完成了從輸入到輸出的信息無損傳遞。顯然,這不太現(xiàn)實(shí)。
后者則是到落地驗(yàn)證階段,判斷其智駕水平是不是像「老司機(jī)」,能處理各種 Corner case。這是唯一可靠的辨別方式。
有行業(yè)人士表示,「端到端方案做出來后,自動(dòng)駕駛水平會(huì)有明顯飛躍,如果效果差不多,那說明端到端方案是假的。」
03、端到端不一定是最終解,但是現(xiàn)今最優(yōu)解
從上海人工智能實(shí)驗(yàn)室發(fā)表的 UniAD 獲得 CVPR 2023 最佳論文,到特斯拉 FSD V12 的問世,再到智駕企業(yè) Wayve 獲 10 億美元融資,在學(xué)界、業(yè)界、資本的「共謀」下,端到端智駕開啟了新一輪產(chǎn)業(yè)革命。
英偉達(dá)汽車事業(yè)部副總裁吳新宙認(rèn)為,端到端正是智駕三部曲的最終曲。
小鵬 CEO 何小鵬也直言,端到端將對(duì)智駕帶來顛覆性變革。
不過,在端到端智能體研討會(huì)關(guān)于端到端 VS 傳統(tǒng)模塊化的圓桌辯論中,最后結(jié)論卻是端到端設(shè)計(jì)并未完全碾壓傳統(tǒng)模塊化設(shè)計(jì),這其中依然存在關(guān)于驗(yàn)證、落地、量產(chǎn)的冷思考。
所以只能說,端到端不一定是靠近智駕終局的最終解,但目前來看是最優(yōu)解,它能夠處理傳統(tǒng)路徑難以解決的極端案例,并且代表了一種減少人工編碼依賴,更高效的思路。
基于這個(gè)路徑,或許能夠通往智駕的更高階段。
現(xiàn)在,包括學(xué)界、車企、智駕供應(yīng)商在內(nèi),所有人都朝向端到端這個(gè)方向奔去。
從主體細(xì)分,三者在端到端智駕發(fā)展路徑中的側(cè)重點(diǎn)與分工角色還不太一樣。
學(xué)界側(cè)重算法架構(gòu)和技術(shù)路徑的探索,正如上海人工智能實(shí)驗(yàn)室開源的 BEVFormer 架構(gòu),是當(dāng)下通用的視覺感知算法結(jié)構(gòu);以及清華 MARS Lab 最早發(fā)表了「無圖」自動(dòng)駕駛方案,實(shí)現(xiàn)了自動(dòng)駕駛地圖的記憶、更新、感知一體化。
學(xué)術(shù)思想的迸發(fā)被投射到業(yè)界,進(jìn)而推動(dòng)了技術(shù)的落地與發(fā)展方向。比如清華 MARS Lab 的 BEV 檢測(cè)算法、BEV 跟蹤算法等,就在理想汽車的產(chǎn)品中廣泛應(yīng)用落地。
不過鏈接商業(yè)端的智駕供應(yīng)商與車企,考慮更多的除了方案的系統(tǒng)性、落地可行性,更重要的,是在時(shí)間競賽中搶占上風(fēng)。
目前,諸多智駕供應(yīng)商于近兩年都推出了自研的端到端量產(chǎn)方案。
去年 4 月,毫末智行發(fā)布智駕生成式大模型 DriveGPT(雪湖·海若),這是實(shí)現(xiàn)端到端智駕的重要技術(shù)載體。
截至今年 5 月,搭載毫末 HPilot 智駕車輛超過 20 款,用戶輔助駕駛行駛里程突破 1.6 億公里。
小馬智行也于去年 8 月推出端到端智駕模型,已同步搭載到 L4 級(jí)自動(dòng)駕駛出租車和 L2 級(jí)輔助駕駛乘用車。
今年 4 月,元戎對(duì)外展示了即將量產(chǎn)的高階智駕平臺(tái) DeepRoute IO 以及基于 DeepRoute IO 的端到端解決方案。
同個(gè)時(shí)段,商湯絕影推出面向量產(chǎn)的 UniAD,實(shí)現(xiàn)去高精地圖,同時(shí)還發(fā)布了下一代智駕技術(shù) DriveAGI,是基于多模態(tài)大模型打造的自動(dòng)駕駛解決方案。
顯然,端到端量產(chǎn)落地,已經(jīng)箭在弦上。
尤其是在特斯拉 FSD 釋放入華信號(hào)后,車企們更是坐不住了。
小鵬在 5 月份就宣布端到端方案量產(chǎn)上車,蔚來、理想也于今年上半年加緊推動(dòng)端到端模型上車計(jì)劃。
不過,2024 年只能勉強(qiáng)稱之為端到端量產(chǎn)落地元年,真正的大范圍上車預(yù)計(jì)在 2025 年。
商湯絕影表示,端到端更合理的落地時(shí)間在明年下半年,能夠達(dá)到一個(gè)量產(chǎn)導(dǎo)入狀態(tài)。因?yàn)槎说蕉思夹g(shù)方案想要成熟上線,需要經(jīng)過大量可靠性驗(yàn)證。
一位端到端行業(yè)人士也指出,「端到端上車,說上肯定能上,但上完之后到底有什么效果是另一回事,如果想要達(dá)到特斯拉這般效果,今年之內(nèi)還是非常困難。」
但無論如何,端到端的確掀起了新一場(chǎng)檢驗(yàn)智駕實(shí)力的競賽,而現(xiàn)在競賽來到了下半場(chǎng)。
學(xué)界、業(yè)界在賽跑的同時(shí),也在相互助力,一同探索端到端的落地階段。
目前來看,探索方向呈現(xiàn)三大趨勢(shì),主要對(duì)應(yīng)的是端到端落地三大挑戰(zhàn),即:
端到端如何控制成本?
端到端如何應(yīng)對(duì)黑盒問題?
端到端落地如何進(jìn)行標(biāo)準(zhǔn)化驗(yàn)證?
一是端到端的優(yōu)化。
端到端作為一個(gè)新技術(shù)路徑,大算力、大數(shù)據(jù)、大算法的高需求,構(gòu)建了玩家的高門檻。大多數(shù)企業(yè)難以有特斯拉的決心與實(shí)力,投入十億,甚至百億美元 All in 端到端。
更何況,考慮到新事物的試錯(cuò)成本,在算法架構(gòu)上,需要有意斟酌,如何平衡效率與成本。
據(jù) Momenta CEO 曹旭東介紹,Monmenta 的思路是把端到端架構(gòu)分為兩條支路,即一條是端到端大模型,類比人的長期記憶;另一條支路是感知、認(rèn)知階段,類比人的短期記憶。
通過短期記憶形式先驗(yàn)證方法正確性與數(shù)據(jù)有效性后,再轉(zhuǎn)移至端到端大模型的支路上,保證高效訓(xùn)練。相比直接應(yīng)用端到端模型,這種技術(shù)方式的訓(xùn)練成本能縮小 10-100 倍。
二是端到端的兜底。
端到端智駕相當(dāng)于類人駕駛,但真正到了落地,還存在黑盒子的不可解釋性問題亟待解決,尤其面對(duì)國內(nèi)復(fù)雜的城市路況,安全性難以得到完全保障。
比如理想推出了一套雙系統(tǒng)方案對(duì)端到端兜底。系統(tǒng) 1 采用端到端,對(duì)應(yīng)正常的駕駛能力;系統(tǒng) 2 承載了 VLM 模型,對(duì)應(yīng)泛化能力。
這相當(dāng)于,系統(tǒng) 1 只需處理簡單的路況問題,而對(duì)于復(fù)雜的邏輯推理、未知問題,系統(tǒng) 2 可以解決。這套體系能夠提升大模型的空間理解能力,并規(guī)避大模型的推理速度問題。
三是端到端的驗(yàn)證。
端到端方案的落地,首先要經(jīng)歷成熟的驗(yàn)證方式。但直接實(shí)車驗(yàn)證顯然成本過于高昂,而基于數(shù)據(jù)回灌的開環(huán)測(cè)試條件(離線數(shù)據(jù)回歸測(cè)試),與端到端智駕驗(yàn)證需要的可交互性并不匹配。
因此,基于模擬器實(shí)現(xiàn)模型的閉環(huán)測(cè)試驗(yàn)證,成為了當(dāng)下驗(yàn)證的可行路徑。報(bào)告指出,閉環(huán)仿真工具的研發(fā)是端到端上車的必要條件。
目前行業(yè)在積極開展閉環(huán)仿真工具的探索:
學(xué)術(shù)界普遍采用 CARLA 作為端到端開發(fā)的閉環(huán)仿真模擬器;
智駕生成式 AI 企業(yè)光輪智能結(jié)合生成式 AI,開發(fā)出針對(duì)端到端算法研發(fā)的數(shù)據(jù)與仿真全鏈路解決方案;
以及另一家同類型企業(yè)極佳科技,也打造出一套被稱為世界模型的多模態(tài)視覺生成大模型。
盡管端到端落地的「門前雪」還未掃凈,但行業(yè)對(duì)于端到端的信心已經(jīng)到達(dá)一個(gè)至高點(diǎn)。
畢竟,端到端的出現(xiàn),讓人工智能領(lǐng)域從由「規(guī)則驅(qū)動(dòng)」為主導(dǎo),跨越到以「深度學(xué)習(xí)」為引擎,這代表了一種技術(shù)鴻溝式的飛躍。
智能駕駛,毫無疑問地成為物理世界中,率先體驗(yàn)并展示這一變革的重要端口。
來源:第一電動(dòng)網(wǎng)
作者:汽車之心
本文地址:http://www.155ck.com/kol/235270
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買車,買的放心開的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!



網(wǎng)大牛說專欄作者")





 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)