備受矚目的AlphaGo對戰(zhàn)柯潔以人工智能的4:1完勝告終,賽后柯潔哽咽:“我會繼續(xù)改變自己,而AlphaGo將會繼續(xù)改變世界”。人工智能歷經(jīng)幾次從神壇跌落,此次似乎IT 新一輪革命正在開啟,產(chǎn)業(yè)化元年腳步臨近,分析人工智能前沿技術(shù)路線和最新應(yīng)用場景,探索技術(shù)產(chǎn)業(yè)化的必經(jīng)路徑,繪制人工智能產(chǎn)業(yè)當(dāng)前生態(tài)圖譜。我們相信,汽車、安防,金融、醫(yī)療、服務(wù)將成為AI產(chǎn)業(yè)化的前沿。
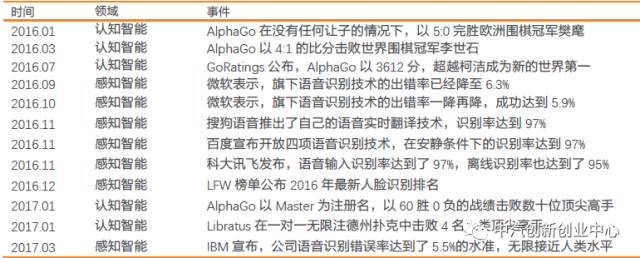
AlphaGo 大勝人類冠軍、Libratus 在德?lián)滟悎錾汐@得成功,人臉識別準確率優(yōu)于人眼,語音識別正確率高于人類。。。。。。AI已在感知階段的各個領(lǐng)域超越人類,這些前沿領(lǐng)域的突破將帶來越來越廣泛的人工智能應(yīng)用領(lǐng)域。

一、人工智能前生今世,曲折中前進
人工智能的Founder——圖靈(Alan Turing),他既是計算機之父,也是人工智能之父。人工智能是指計算機系統(tǒng)具備的能力,它可以履行原本只有依靠人類智慧才能完成的復(fù)雜任務(wù)。硬件體系能力的不足加上發(fā)展道路上曾經(jīng)出現(xiàn)偏差,以及算法的缺陷,使得人工智能技術(shù)的發(fā)展在上世紀80—90 年代曾經(jīng)一度低迷。近年來,成本低廉的大規(guī)模云計算、大數(shù)據(jù)、深度學(xué)習(xí)算法、需求應(yīng)用4 大催化劑的齊備,導(dǎo)致人工智能的發(fā)展出現(xiàn)了向上的拐點。
人工智能的演化歷史
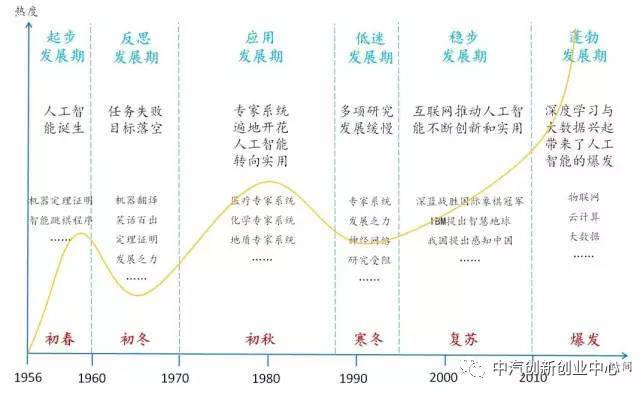
從人工智能發(fā)展的歷史看,基本上是一個算法進化的歷史。隨著計算速度的越來越快,數(shù)據(jù)越來越豐富,新的算法不斷被開發(fā),人工智能的未來讓人充滿了想象。人工智能的未來發(fā)展:
1. 探索新的機器學(xué)習(xí)方法,是發(fā)展人工智能的主要引擎;
2. 推動以知識處理為核心的研究,攻克非確定性信息處理難題;
3. 發(fā)展以神經(jīng)網(wǎng)絡(luò)為主的感知與識別系統(tǒng),提升識別準確率;
二、人工智能發(fā)展的三大背景
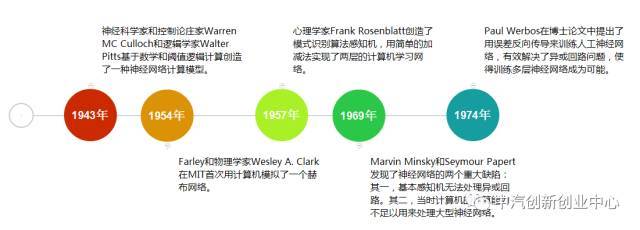
1 神經(jīng)網(wǎng)絡(luò)的出現(xiàn),為人工智能的出現(xiàn)提供動力
人類的大腦中有數(shù)百至上千億個神經(jīng)元,而且每個神經(jīng)元都通過成千上萬個“突觸”與其他神經(jīng)元相連,形成超級龐大和復(fù)雜的神經(jīng)元網(wǎng)絡(luò),以分布和并發(fā)的方式傳導(dǎo)信號,相當(dāng)于超大規(guī)模的并行計算(Parallel Computing)。因此盡管單個神經(jīng)元傳導(dǎo)信號的速度很慢(每秒百米的級別,遠低于計算機的CPU),但這種超大規(guī)模的并行計算結(jié)構(gòu)仍然使得人腦遠超計算機,成為世界上到目前為止最強大的信息處理系統(tǒng)。
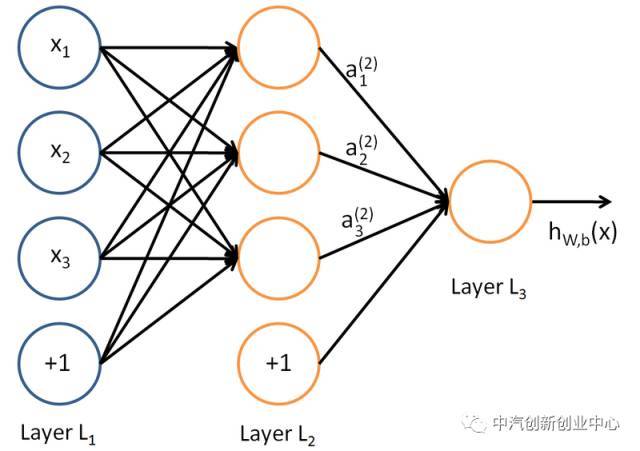
人工神經(jīng)網(wǎng)絡(luò)算法模擬生物神經(jīng)網(wǎng)絡(luò),是一類模式匹配算法。通常用于解決分類和回歸問題。重要的人工神經(jīng)網(wǎng)絡(luò)算法包括:感知器神經(jīng)網(wǎng)絡(luò)(Perceptron Neural Network),反向傳遞(Back Propagation),Hopfield 網(wǎng)絡(luò),自組織映射(Self-Organizing Map, SOM)。
深度學(xué)習(xí)算法對人工神經(jīng)網(wǎng)絡(luò)進一步發(fā)展。目前,在短短的不到10 年時間里,深度學(xué)習(xí)帶來了在視覺、語音等領(lǐng)域革命性的進步,引爆了人工智能爆發(fā)的新浪潮。


2 運算能力和儲存能力提升,為人工智能第三次浪潮的到來提供基礎(chǔ)
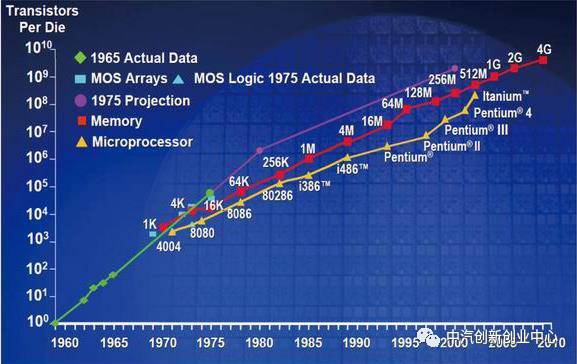
1946 年計算機正式出現(xiàn)在人們的視野中,至今已有70 年的發(fā)展歷史,從5000 次/秒的加法運算能力到現(xiàn)在5.59 億次/秒的峰值計算速度;從簡單的科學(xué)計算到現(xiàn)在各領(lǐng)域數(shù)據(jù)處理的應(yīng)用;從單機處理到全球網(wǎng)絡(luò)互聯(lián)互通的協(xié)同作業(yè);從人工連線驅(qū)動計算到現(xiàn)在的智能大腦的誕生;計算機運算能力的不斷提升,為人工智能大時代的到來提供了物理硬件基礎(chǔ)。
CPU 和GPU 計算能力比較
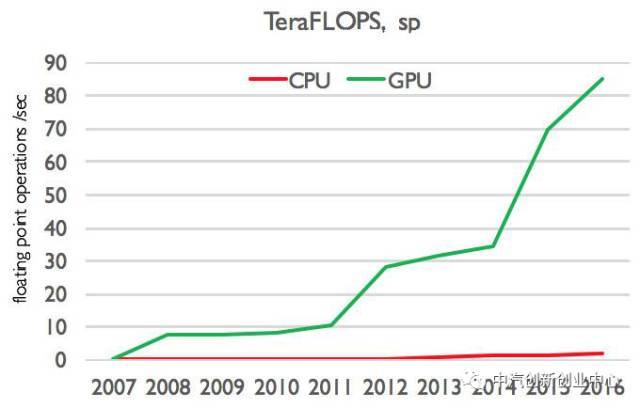

摩爾定律驅(qū)動的產(chǎn)業(yè)

3 各界需求的不斷攀升,為人工智能的完善保駕護航
如今,人類對人工智能的需求不斷增加:在工業(yè)制造業(yè)中,大量的機器人可以提升制造效率,可以減少產(chǎn)品的殘次率,更重要的是在人力成本上的節(jié)省;在安防領(lǐng)域中,通過視頻監(jiān)控,人臉識別,人群監(jiān)控等技術(shù)為市民安全帶來保障;在醫(yī)療健康方面,通過海量數(shù)據(jù)對比輔助醫(yī)生進行診斷,自動讀片等;在智能駕駛方面,路標識別的準確率不斷提高,圖像和運動傳感器與全球定位系統(tǒng)結(jié)合,大大地降低了成本,提升了整體安全系數(shù)。
短期階段,人工智能在金融領(lǐng)域會取得較大發(fā)展;到了中期,隨著大數(shù)據(jù)技術(shù)的不斷完善,海量的數(shù)據(jù)積累,會推動人工智能在醫(yī)療方面取得新的突破;從長期來看,人工智能的最終點就是無人駕駛,計算力、海量數(shù)據(jù)、算法與決策、以及傳感器的數(shù)據(jù)采集四要素完備以后,人類才能逐步實現(xiàn)全天候、全自動化的無人駕駛。
人工智能板塊藍圖

三、人工智能成為IT 架構(gòu)的核心
信息和通訊技術(shù)(ICT)是信息技術(shù)與通訊技術(shù)相融合而形成的一個新的概念和新的技術(shù)領(lǐng)域。如今云計算、移動化、網(wǎng)絡(luò)和大數(shù)據(jù)技術(shù)不斷走向深度融合,人工智能在IT 架構(gòu)中的核心地位也日益顯現(xiàn)。從移動互聯(lián)時代開始,從軟件到硬件、從信息收集到平臺服務(wù),人工智能在各個領(lǐng)域的生態(tài)會更加完整,未來隨著物聯(lián)網(wǎng)和云計算的發(fā)展,人工智能在應(yīng)用方面的深度和廣度會越來越大。
ICT 在過去的變革

到2025 年,全球?qū)⒂?000 億臺數(shù)字設(shè)備接入物聯(lián)網(wǎng),物聯(lián)網(wǎng)市場估值將高達2 萬億美元。屆時,ICT 供應(yīng)商需要以互聯(lián)基礎(chǔ)設(shè)施和移動寬帶技術(shù)為基礎(chǔ),打造最高水準的數(shù)字生態(tài)體系,讓人們無論何時何地都能享受高速聯(lián)接服務(wù)。
四、人工智能全方位超越人類,產(chǎn)業(yè)化漸近
人工智能主要三階段:運算智能、感知智能、認知智能
隨著算法的迅速成熟,人工智能早期的“算法紅利”時代正式過去,而產(chǎn)業(yè)化步伐正在開啟。于此同時,人工智能向認知智能的探索也在迅速推進。
我們認為,經(jīng)過深度學(xué)習(xí)這項里程碑性的技術(shù)突破發(fā)展,機器視覺方面,人工智能在識別率等技術(shù)上已經(jīng)成功超越人類水平,下一階段更應(yīng)該關(guān)注三維信息、大規(guī)模N 對N 比對等技術(shù)發(fā)展和技術(shù)應(yīng)用等問題;語音辨別方面,人工智能雖然已經(jīng)無限接近人類水準,但是仍然存在1%識別率差距、實驗條件局限等最后1 公里要走,未來必須在發(fā)展產(chǎn)品應(yīng)用的同時,抓緊研發(fā)突破核心技術(shù),實現(xiàn)對人類感知的全方位超越。
現(xiàn)今,全球市場都在人工智能的巨大浪潮中,各家公司、機構(gòu)加緊對戰(zhàn)略、研發(fā)和投資的部署和準備。其中,國外的科技巨頭-蘋果、谷歌、微軟、IBM,國內(nèi)的互聯(lián)網(wǎng)巨頭-百度、阿里、騰訊,國內(nèi)專業(yè)科技公司-商湯科技、Face++、科大訊飛等都在這場巨大的革命性的風(fēng)潮中,開始對感知智能、認知智能進行投入,并開始嶄露頭角。
梳理整個人工智能產(chǎn)業(yè),這個階段的人工智能應(yīng)用擁有三個核心競爭壁壘:數(shù)據(jù)能力,產(chǎn)品化能力,渠道能力。這三個核心能力將幫助企業(yè)駕馭人工智能技術(shù),并實現(xiàn)迅速變現(xiàn)。

五、人工智能前沿——移動智能機器人——智能汽車
1 無人駕駛“升級”路徑
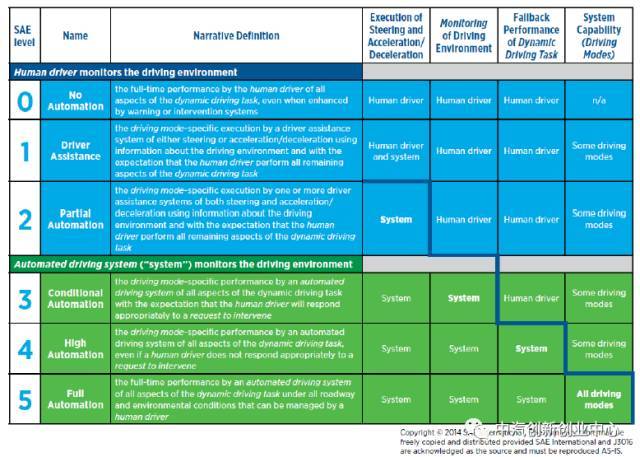
根據(jù)美國國家公路交通安全管理局(NHTSA)所采用的美國汽車工程師學(xué)會(SAE)的分級方式,將自動駕駛分為五個等級。
SAE 自動駕駛安全等級劃分
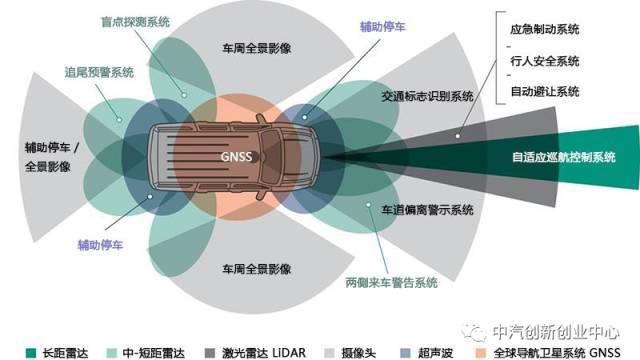
2 三大傳感器比較
傳感器方面,目前主流的技術(shù)基本基于三款傳感器設(shè)備:攝像頭穿透力最弱,需要光線,單目攝像頭只能獲取2D 圖像,3D 環(huán)境建模目前靠算法理解,一旦獲取的圖形有誤差,會極大的影響最終分析結(jié)果,優(yōu)勢在成本低廉,圖像識別技術(shù)對物體識別的能力最好,研究時間最長且技術(shù)普遍較為成熟。
三款傳感器主要應(yīng)用比較


主流完全自動駕駛系統(tǒng)車輛傳感器配置

3 無人駕駛兩大陣營
無人駕駛研究領(lǐng)域目前基本分為兩個陣營:
1、以谷歌、百度以及初創(chuàng)科技公司為主的“越級式”研究型陣營——「在特定區(qū)域里發(fā)揮全效功能」;他們強調(diào)通過采集某一區(qū)域的高精度3D 地圖信息配合激光雷達在某一區(qū)域?qū)崿F(xiàn)無人駕駛。
2、以傳統(tǒng)汽車廠商和Mobileye 合作的“遞進式”應(yīng)用型陣營——「在任何區(qū)域里發(fā)揮局部功能」;他們強調(diào)「萬無一失」的復(fù)雜傳感器組合(redundancy in system)識別周圍環(huán)境,通過低精度導(dǎo)航地圖在任何區(qū)域?qū)崿F(xiàn)無人駕駛。
但是殊途同歸,兩大陣營的終極愿景都是:「在任何區(qū)域里發(fā)揮全效功能」。未來的自動駕駛需要幾乎實時級別的數(shù)據(jù)傳輸;對于環(huán)境的識別以及數(shù)據(jù)處理,將更加依賴車載電腦在車上完成實時計算;現(xiàn)在很多公司要做到無人駕駛前80%的功能較為簡單,但如果想要做完后面的20%,就是無人車向超級司機的轉(zhuǎn)變。
無人駕駛兩大陣營

A:遞進式陣營
遞進式陣營主要以傳統(tǒng)汽車廠商為主,包括一級二級供應(yīng)商,整個供應(yīng)商的關(guān)系也在重組,主要源于四個核心的驅(qū)動因素:降低技術(shù)風(fēng)險、分擔(dān)研發(fā)成本、縮短研發(fā)時間以及鎖定客戶。
這個陣營的“升級”路徑是伴隨ADAS 功能逐漸向智能駕駛完善的方向前進的,所以遵循「在任何區(qū)域里發(fā)揮局部功能」的中期目標。
強調(diào)「萬無一失」的復(fù)雜傳感器組合(redundancy in system)的配合提供路徑標識與規(guī)劃等功能,通過低精度導(dǎo)航地圖在任何區(qū)域?qū)崿F(xiàn)智能駕駛。
隨著類似REM 等高精度地圖的逐步整合,短期內(nèi)能夠為駕駛系統(tǒng)提供額外的安全冗余,長期上配合車聯(lián)網(wǎng)增強可選路徑預(yù)測和規(guī)劃的功能。
遞進式陣營的可商業(yè)化路徑更為清晰,從ADAS 功能到半自動駕駛的升級過程中,新功能的推出和疊加對消費者有較大的吸引力。而隨著L4 高度自動駕駛功能的完善,我們認為技術(shù)普及到量產(chǎn)的過程將會推動滲透率的提升。
B: 越級式陣營
越級式陣營以谷歌、百度以及初創(chuàng)科技公司為主,依靠強大的技術(shù)背景和巨額的研發(fā)投入進行越級式發(fā)展:
強調(diào)通過采集某一區(qū)域的高精度3D 地圖信息配合激光雷達在某一區(qū)域?qū)崿F(xiàn)高度自動駕駛,也就是「在特定區(qū)域里發(fā)揮全效功能」的中期目標。
這個陣營通過以激光雷達為主的傳感器進行路面地圖采集,把高精度地圖作為路徑導(dǎo)航規(guī)劃決策的主要依據(jù),其他傳感器主要用作預(yù)防碰撞的功能。
相較于遞進式陣營,特定區(qū)域的高精度地圖規(guī)模化效應(yīng)不明顯,需要投入較高成本在擴大地圖掃描范圍上。
目前商業(yè)化落地路徑不明確,因為越級式的技術(shù)進步在智能駕駛等級達到L4 水平之前,由于不依靠ADAS 功能的支撐,較難出現(xiàn)過渡性產(chǎn)品。
4 各國政府政策指引
西方國家近年為安全評級加入更多安全駕駛功能標準,政策上提供結(jié)構(gòu)化行業(yè)發(fā)展推動力,促進ADAS 的穩(wěn)步發(fā)展。根據(jù)美國公路安全保險協(xié)會(Insurance Institute for Highway Safety,IIHS)的數(shù)據(jù),超過90%的交通事故都是有人為原因造成的,IIHS 預(yù)計,如果所有的車輛都配備了FCW、LDW、側(cè)視輔助和可調(diào)節(jié)頭燈等ADAS 功能,每年可防止或減輕多達190萬次交通事故,包括減少三分之一的致命事故以及五分之一的嚴重/中度傷害事故。
聯(lián)合國在2016 年3 月對《維也納道路交通公約》進行了修訂。在修正案中,所有只要是符合聯(lián)合國的車輛管理條例,或者是駕駛員可以人工關(guān)閉的自動駕駛技術(shù),就可以被用到交通運輸中。這項修正案在一個月之后就正式實施,相當(dāng)于是給了自動駕駛車一個合法的身份。
各國車輛安全體系評分發(fā)展


4 智能汽車發(fā)展前沿線報
A:谷歌的超級司機
谷歌無人車是Google X 旗下的一個全自動駕駛汽車項目,項目起始于2009 年,此前由斯坦福大學(xué)人工智能實驗室前領(lǐng)導(dǎo)人及谷歌街景項目的聯(lián)合創(chuàng)始人Sebastian Thrun 負責(zé)。現(xiàn)在的負責(zé)人是曾擔(dān)任現(xiàn)代汽車美國分公司CEO 及汽車電商TrueCar 總裁的John Krafcik。谷歌車目前獲得了美國4 個州的測試牌照,并且最近從實驗室畢業(yè),分拆為一家名叫Waymo 的谷歌子公司,正式開始商業(yè)化之路。
在2014 年提出的無方向盤、無剎車踏板結(jié)構(gòu)的無人車概念,并在2015 年推出可進行公路試的無人車原型。主要部件包括一套由64 個激光單元組成的LIDAR 傳感計算系統(tǒng),擁有120 米掃描半徑,水平360 度及垂直26.8 度視野(Field of View),0.08 度角分辨率,0.4 度垂直分辨率,掃描精度小于2 厘米,每秒掃描點數(shù)量超過220 萬次。


此外無人車還配備了:分別裝載在前后保險杠上的四個車載雷達,用來掃描在汽車身處高速公路時的快速車流狀況;一個安裝在后視鏡上的攝像頭,用來捕捉交通信號燈提示;GPS、慣性測量器IMU 以及車輪編碼器(wheel encoder),來測定無人車的運動軌跡和實時位置。
現(xiàn)在谷歌關(guān)注無人車一些更為高級的駕駛技術(shù)(最后10%的任務(wù)),讓無人車在面對緊急車輛、施工區(qū)域、車道封閉等突然變化或罕見路況時,具備更好的檢測與反應(yīng)機制。目標是打造一個能于路面實體自然交互的谷歌超級司機。無人駕駛系統(tǒng)目前已具備理解行人手勢、自動鳴笛、自行車手的識別等功能,正在優(yōu)化突變路況的應(yīng)急反應(yīng)能力。
B:Waymo 的Tier One 野心
谷歌無人車去年12 月從實驗室畢業(yè),分拆為一家名叫Waymo 的谷歌子公司,并任命曾擔(dān)任現(xiàn)代汽車美國分公司CEO 及汽車電商TrueCar 總裁的John Krafcik 為Waymo 的CEO,正式開始商業(yè)化之路。
自造傳感器+軟硬結(jié)合
Waymo 新研發(fā)出了長距離和短距離兩種LiDAR 激光雷達,取代了Waymo 原有的一個中程激光雷達配置,并達到了360 度全面覆蓋范圍。在此之前,谷歌無人車使用的是Velodyne的HDL-64E 激光雷達,成本為7.5 萬美元左右,如今Waymo 自行制造的激光雷達,降低了激光雷達90%的成本至7500 美元。激光雷達作為無人車配置中精確度最高的傳感器,一直受限于成本高企而無法商業(yè)落地。Waymo 通過自造激光雷達,將成本下降到可控范圍內(nèi),力圖突破無人駕駛量產(chǎn)的瓶頸,同時利用成本優(yōu)勢也擴大了Waymo 與汽車制造商的合作與規(guī)模生產(chǎn)。
John Krafcik 還表示,Waymo 已經(jīng)可以自行設(shè)計無人駕駛技術(shù)所需的所有套件,緊密集成傳感器硬件、傳感器融合軟件、高精度地圖、駕駛決策系統(tǒng)和其他方面的全部自動駕駛系統(tǒng)組件。Waymo 軟硬結(jié)合的戰(zhàn)略,一方面利用其自行研發(fā)的傳感器達發(fā)揮成本與技術(shù)優(yōu)勢,達到范圍經(jīng)濟;另一方面,軟件與硬件在同一個體系內(nèi),硬件的改進以及軟件方面數(shù)據(jù)的收集形成了良性循環(huán),及大的提高數(shù)據(jù)識別效率,減少人工調(diào)教和訓(xùn)練成本。最終,軟硬件合力開發(fā),將會大大縮短新一代產(chǎn)品的開發(fā)周期。
攜手本田與克萊斯勒,定位一級供應(yīng)商
1 月份的底特律北美國際汽車展上,Waymo 展示了與菲亞特克萊斯勒推出合作的全自動駕駛Pacifica Hybrid Minivan,Pacifica 將搭載Waymo 自行制造所有的傳感器,首批100 輛已于去年11 月投產(chǎn)。在合作過程中,克萊斯勒修改了電動系統(tǒng)及其它組件,100 輛汽車是在加拿大組裝的,然后運到Waymo 安裝自動駕駛設(shè)備。汽車已經(jīng)在密歇根的克萊斯勒測試公路上進行測試,1 月底,也會開始在亞利桑那州和加州公共道路上投入路試。
安全性方面,2016 年Waymo 的自動駕駛車輛的安全性已經(jīng)提高了四倍,平均每千英里人工接手系統(tǒng)次數(shù)(Disengages/1,000 miles)從2015 年的0.8 次,下降到2016 年0.2 次。截止2016 年底已累計完成250 萬英里的全自動駕駛路試;第一個100 萬英里用了6 年,第二個100 萬英里用了16 個月;預(yù)計今年5 月前累計行駛里程將達到300 萬英里。2016 年全年還完成了10 億英里的模擬路試。
同時,Waymo 將牽手本田,同樣由本田為Waymo 提供車輛,配合Waymo 自動駕駛技術(shù),共同開發(fā)自動駕駛汽車。Waymo 將自己定位為汽車產(chǎn)業(yè)的一級供應(yīng)商,它為傳統(tǒng)汽車商提供一套完整的自動駕駛解決方案。Waymo 未來集中注意力在與克萊斯勒、本田這樣的OEM 廠家建立伙伴關(guān)系上,幫助他們把車輛變成無人駕駛車。
我們可以看到,在推動無人駕駛落地的過程中,傳統(tǒng)車企一直視科技企業(yè)為潛在競爭對手,而不愿意分享行車數(shù)據(jù)。但菲亞特克萊斯勒、本田等車企并沒有巨頭們的巨額研發(fā)投入,因此類似的戰(zhàn)略合作對于加速無人駕駛技術(shù)的推廣顯得尤為重要。
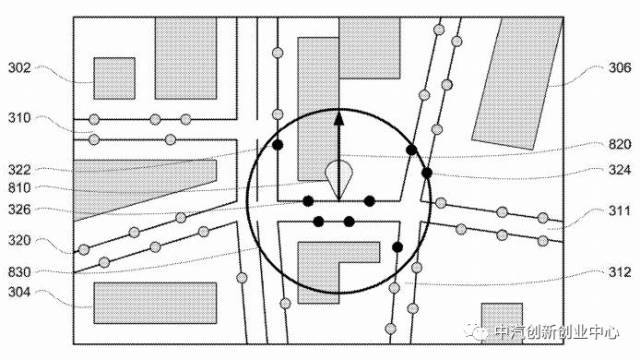
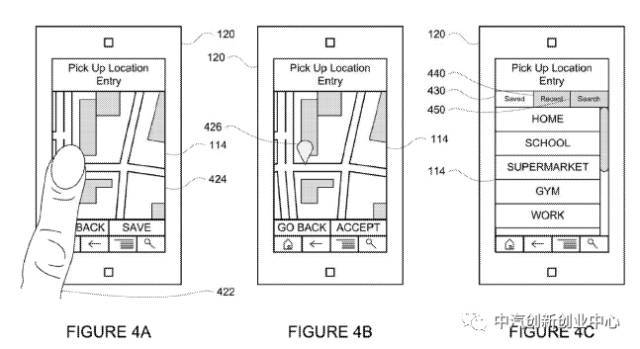
申請無人“網(wǎng)約車”專利,進入無人共享汽車市場
谷歌最近有一個“無人車接送旅客決定接送地點”的專利被披露出來(專利號US20160370194),乘客提供接送或目的地,車輛操縱自身到該位置,整個駕駛過程處于完全自動的駕駛模式。但是自動駕駛車輛接送的難點在于自主車輛可能不能駕駛?cè)祟愸{駛車輛的任何地方,如建筑障礙、交通管制和限速等道路狀況等位置不能夠安全停靠。谷歌稱其專利解決這一難題,主要依靠其集中式的調(diào)度系統(tǒng)。集中式的調(diào)度系統(tǒng)主要由谷歌地圖提供地圖信息,通過政府機構(gòu)、付費信息服務(wù)、自動駕駛車輛實時收錄,獲得關(guān)于道路、建筑物、高地、消防栓、施工區(qū)域以及實時交通狀況等的信息。集中式的調(diào)度系統(tǒng)根據(jù)乘客
提供的位置,提供一些建議的地點以接乘客上車或下車,這些建議的地點包括用戶提供的位置或者附近方便的位置。
當(dāng)無人駕駛技術(shù)真正成熟時,我們預(yù)計會看到技術(shù)最先應(yīng)用在租車和打車市場上,也就是我們常說的自動駕駛出租車(self-driving cabs)的共享經(jīng)濟概念。Uber 一直以來的打算就是未來的叫車服務(wù)將不再需要人類駕駛員,Uber 完全控制駕駛系統(tǒng)以及自有車輛,這樣可以極大地節(jié)約人力成本與提高車輛的使用率,從而減低路面的擁堵。谷歌的專利也為長期致力于汽車共享服務(wù)的Uber 帶來了挑戰(zhàn)。
通用管理層曾表示,通用與Lyft 以及Cruise Automation 的合作就被看作是通用希望未來人們使用Lyft 打車時搭乘無人交通工具。通用集團總裁Dan Ammann 表示他們非常清楚地看到了未來自動駕駛出租車市場的巨大發(fā)展空間,他們也認為無人駕駛技術(shù)最先應(yīng)用的地方就是拼車及租車服務(wù)。
谷歌發(fā)布“共享出租”專利
B:Elon Musk 與他的大師計劃:Autopilot 車隊學(xué)習(xí)
Autopilot 1.0 的誕生
2014 年10 月,特斯拉為Model S 裝備了在保險杠和車身周圍的12 個遠距超聲波傳感器,能夠進行16 英尺距離的全車身360 度感應(yīng)。用戶再多花4250 美元,還能購買一個升級“技術(shù)包”,包括一個前置車載雷達,一個由Mobileye 開發(fā)的光學(xué)攝像頭,以及數(shù)控輔助制動系統(tǒng)。這些硬件能在車輛發(fā)生碰撞之前及時接管汽車并制動,并為特斯拉收集了大量的行車數(shù)據(jù),然后等待車載系統(tǒng)的匹配——到2015 年10 月14 日,特斯拉通過OTA 空中升級的方式,為60000 輛安裝了傳感器的Model S 車主們帶來了車載系統(tǒng)的第7 代版本,也就是眾所周知的Autopilot。
Autopilot 這個詞來源于航空飛行領(lǐng)域,指的是飛行員在飛行時所使用的自動駕駛儀系統(tǒng),特斯拉的Autopilot 結(jié)合車輛的4 個模塊:攝像頭、雷達、超聲波傳感器以及GPS,為駕駛員提供了類似飛行員的操作,包括車速控制、車道內(nèi)自動跟車、變更車道、自動泊車等。自動側(cè)方泊車功能在奔馳、寶馬、通用的汽車上也能看到。而且與飛機需要進入巡航平飛狀態(tài)后才能進入自動飛行模式一樣,特斯拉Autopilot 不會自動啟動,在進入Autopilot 前,車輛需要感知到清晰地車道線、相對穩(wěn)定的車流速度、周圍其他車輛的感應(yīng)以及所處地區(qū)的地圖數(shù)據(jù)。
特斯拉Autopilot 升級階段
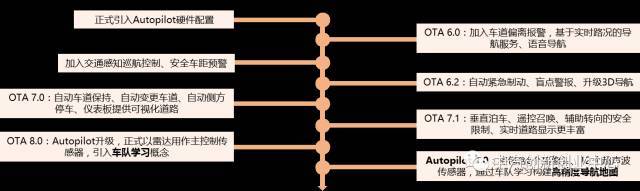

按照這個標準,Autopilot 目前處在等級2-3 之間,需要駕駛員的監(jiān)督,只能算是自動駕駛的初級階段,一定程度上減輕駕駛員疲勞。特斯拉CEO 馬斯克預(yù)計,在2018 年特斯拉有可能達到等級4 的水平。在特斯拉系統(tǒng)7.1 的升級中,加入了一項“遙控召喚”的功能,車主可以用鑰匙遙控汽車進出自家車庫。而馬斯克就希望,這項“召喚”功能可以在未來2 年內(nèi)進步到,車主人在洛杉磯,能夠遙控召喚停放在紐約的汽車,然后汽車自動行駛穿越美國,來到車主身邊。
特斯拉在2016年10 月發(fā)布了自動駕駛系統(tǒng)的硬件升級,表示現(xiàn)在開始所有在產(chǎn)的車輛都將配備升級版無人駕駛硬件,以達到支持完全無人駕駛系統(tǒng)的硬件配置。主要包括8 個車載攝像頭(其中3 個為前向攝像頭覆蓋廣角、長焦)進行250 米范圍的360 度成像,12 個超聲波傳感器作為輔助,檢測距離提高了近1 倍。一個升級后的毫米波前向雷達為系統(tǒng)提供冗余波長,增強車輛在大雨、塵霧中的行車探測能力。為配合此套硬件,特斯拉將開發(fā)Autopilot 2.0 自動駕駛系統(tǒng),并為該系統(tǒng)搭載以英偉達DRIVE PX 2 超級車載電腦,計算能力為此前系統(tǒng)的40 倍,每秒運力達到12 萬億次,以此來運行特斯拉開發(fā)的針對圖像、聲吶、雷達數(shù)據(jù)進行處理的神經(jīng)網(wǎng)絡(luò)。升級后的完全無人駕駛系統(tǒng)安裝價格為8000 美元(消費者還可以選擇安裝加強Autopilot 配置,僅搭載4 攝像頭,安裝價格為5000 美元),而上一代Autopilot 的價格只有3000 美元。
特斯拉Model S 與奔馳E200 的智能駕駛測試對比

Elon Musk 表示,無人駕駛技術(shù)要能達到監(jiān)管層面的認可,需要至少積累10 億公里的無人駕駛數(shù)據(jù)。截至去年5 月,硬件配套的特斯拉車隊完成了7.8 億公里的數(shù)據(jù);OTA 7.0 升級后,Autopilot 激活下1 億公里的智能駕駛數(shù)據(jù);車隊每天會記錄420 萬公里里程數(shù)據(jù)(現(xiàn)在這個數(shù)據(jù)已經(jīng)擴大到500 萬公里),只需要大約6 小時便可以收集100 萬公里數(shù)據(jù)。
來源:第一電動網(wǎng)
作者:中汽創(chuàng)新創(chuàng)業(yè)中心
本文地址:http://www.155ck.com/kol/52482
本文由第一電動網(wǎng)大牛說作者撰寫,他們?yōu)楸疚牡恼鎸嵭院椭辛⑿载撠?zé),觀點僅代表個人,不代表第一電動網(wǎng)。本文版權(quán)歸原創(chuàng)作者和第一電動網(wǎng)(www.155ck.com)所有,如需轉(zhuǎn)載需得到雙方授權(quán),同時務(wù)必注明來源和作者。
歡迎加入第一電動網(wǎng)大牛說作者,注冊會員登錄后即可在線投稿,請在會員資料留下QQ、手機、郵箱等聯(lián)系方式,便于我們在第一時間與您溝通稿件,如有問題請發(fā)送郵件至 content@d1ev.com。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

大牛說專欄作者")






 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號