計算機常常被用作一種衡量單位,代表一套從底層硬件到應用軟件層的全棧式系統。實際上,在汽車仍處于E/E分布式架構時,就有說法稱其攜帶了幾百個小型計算機——ECU。
Elektrobit合作伙伴管理亞洲區負責人顧淳解釋道,基于功能,ECU需要進行從下至上,從硬件、操作系統(OS)、中間件、到應用進行全棧式開發,OEM則需要為全套系統買單。
從這個視角去看,軟硬件解耦實際上是節省成本的一條路徑:通過AUTOSAR對于OS和中間件(MW)的標準化,全車裝載的幾百個ECU可以依據不同的功能分區,基于同一個基礎進行開發,既減少了供應企業的重復作業和維護難度,也使得OEM也不再為重復部件買單,推而廣之可以形成一定程度的經濟效益。
顧淳認為,伴隨解耦程度的加深,車載功能、軟件操作平臺、汽車平臺之間互相獨立的程度會朝手機看齊,而整車級操作系統平臺將是這一過程的重要助推力。

圖片來源:Elektrobit 官網
操作系統:軟硬件橋梁&計算機管家
操作系統就是硬件之上的第一層軟件,提供硬件和其他軟件溝通的接口,它誕生于裸機編程難以滿足系統需求,后期維護和升級成本激增的背景下,被用以控制其他程序運行、管理配置內存、決定系統資源供需的優先次序、以及一些基本的服務程序,可以類比為計算機這個大宅院里兢兢業業的管家。
傳統汽車行業中,ECU電子開發所使用的OSEK OS(汽車電子開放系統及接口),是一個為滿足汽車電子可靠性、實時性、成本敏感性等需求而打造的實時單核操作系統,AUTOSAR基于OSEK OS提出CP AUTOSAR OS,支持多核處理,對ECU所使用OS進行相對統一的規范。
應用于ECU的汽車底層操作系統主要分為三類:基于QNX、Linux、Android三大OS內核搭建。根據ECU的主要功能分區不同,又分為車控操作系統和車載操作系統,其中車載操作系統主要包括信息娛樂和智能座艙,車控操作系統又分為安全車控(動力、底盤等)和自動駕駛車控。
從開發上區分,汽車操作系統包含GPOS(通用操作系統)和RTOS(實時操作系統),前者能夠實現聯機的多用戶交互,后者必須確保在可預測的時間限制內,對外界的事件或者數據進行響應。
具體而言,GPOS一般采用時間片輪轉法,通過時鐘中斷或者軟中斷的方式打斷當前執行任務,搶奪CPU控制器,來進行任務調度并切換至新任務開始執行,一般用于娛樂系統的人機交互。
RTOS需要對任務處理做出快速響應,并控制所有實時任務協調一致運行,一般用于安全、車控等領域,常見的有QNX、VxWorks等。
總的來說,針對車載操作系統中信息娛樂和智能座艙的部分,由于功能安全和信息安全要求不高,多基于Android/Linux進行開發,使用GPOS通用操作系統。針對有較高安全性和實時性要求的自動駕駛控制器,一般基于 Linux/QNX/VxWorks 進行開發,使用RTOS實時操作系統。
圖片來源:Elektrobit 官網
整車級OS為汽車“瘦身”
基于內核的開發程度不同,目前的汽車操作系統又分為ROM汽車操作系統和定制性操作系統。
ROM汽車操作系統基于Linux或Android進行有限開發,不涉及系統內核的修改,難度較低,比如寶馬iDrive,小鵬Xmart OS,蔚來NIO OS等等。定制性操作系統在內核基礎上進行深度開發,覆蓋內核到應用程序層面,研發成本高、難度大,比如特斯拉Version,華為鴻蒙OS、AliOS。
隨汽車軟件生態的發展,汽車操作系統隨座艙操作系統、智駕操作系統逐步演進至整車操作系統,從操作系統層面推進汽車從分布式智能向整車智能邁進。
基于內核所做的改動和開發程度越深,也就意味著操作系統的定制化程度越高,從而有助于在用戶端體驗車型特色,真正實現軟件定義汽車。
就開發端而言,整車級別的操作系統有助于將復雜的ECU車輛網絡抽象簡化為單個設備,對車輛的生命周期進行管理、監督和更新的同時,也可以實現一定規模的經濟效益:
分布式E/E架構不僅帶來了巨量線束和傳輸的問題,還提高了OEM和供應企業的成本,AUTOSAR統一規范前,零部件企業如果要開發一個控制車窗的ECU,需要從應用、中間件、操作系統到硬件進行全棧研發,車企則要對整套服務買單。
從分布式E/E架構進入功能集中區域化結構后,同一功能分區的ECU可以基于共用基礎構建,AUTOSAR進一步將不同ECU所共用的中間件和操作系統的標準進行統一,由此節省了開發和購買重復組件的成本,實現了一定程度的經濟效益。
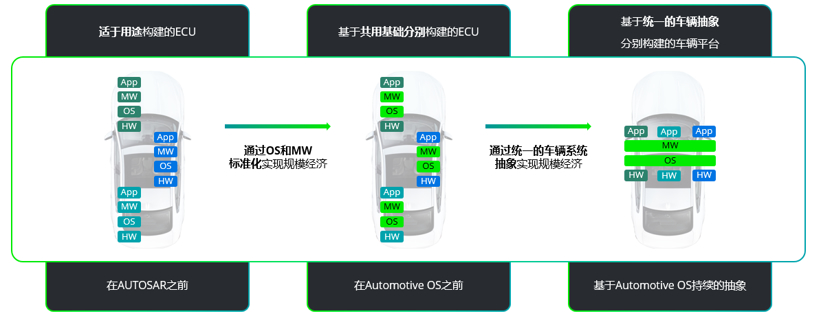
圖片來源:Elektrobit
以此類推,顧淳提出,如果基于統一的車輛系統抽象分別構建車輛平臺,把車的功能開發與整個車輛的生命周期進行分離,將公用部分從功能域范圍內擴大至整車的大部分系統、甚至于整車進行使用,將實現更大規模的經濟效益。
顧淳解釋,所謂“抽象”,是軟硬解耦的進一步演化,將汽車分為可擴展硬件平臺、核心軟件(操作系統部分)、中間件和邊緣計算層(Adaptive & Classic AUTOSAR, DDS, Android)、平臺服務、應用與功能服務層,從原本基于ECU的物理線式傳輸網絡,轉變為使用API進行應用程序之間的通信,不依賴功能域、底層硬件、以及功能執行所在的ECU。

圖片來源:Elektrobit
為何要功能、軟件、車輛平臺兩兩解耦
整車功能開發與車輛的生命周期實現解耦后,顧淳設想,下一階段汽車行業將步入功能開發與軟件平臺生命周期的解耦,進而實現軟件平臺周期和車輛平臺周期的解耦,最終愿景是功能軟件平臺和車輛平臺可以分別獨立維護。

圖片來源:Elektrobit
這一進程同手機的應用生態類似。不同的是,汽車功能應用、軟件平臺、車輛平臺的生命周期相差甚遠,汽車功能需要維護和升級的周期更短,車輛平臺和軟件平臺則受限于硬件,相對更長。
顧淳舉例,預計從2023年~2029年,車輛平臺的迭代周期是3年,軟件平臺的版本更新會同車輛平臺一一對應并高度綁定。相對的,軟件平臺的維護周期為十年,車輛平臺的維護周期以汽車壽命為限,一般在8~15年。
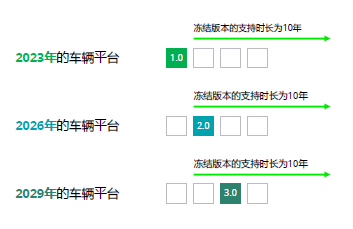
圖片來源:Elektrobit
對比手機行業,以iPhone6s為例,即便設備停產(本機型平臺停止迭代),手機的軟件平臺仍然在持續升級,從IOS12升級到了IOS15。可以看出,汽車行業目前缺陷明顯:在舊的車輛平臺上無法進行軟件平臺升級,在舊的軟件平臺上也不能實現新功能的兼容。
顧淳表示,軟件平臺和車型平臺的生命周期解耦,不僅豐富了用戶的使用體驗,一定程度上也延長了在同一平臺車型上的使用時間,這是汽車軟件生態向手機行業看齊的意義。
要實現功能層面、軟件平臺、車輛平臺的解耦,第一步是整車級OS的構建和可持續運行。顧淳認為要從運行和維護兩個角度切入:從運行看,“標準化”是關鍵詞,需要統一車輛接口,統一系統概念和整車功能,減少車內軟件的變量。從可持續運行看,“維護”是關鍵詞,分離軟件生命周期和車輛生命周期,變量和版本管理支持通過可持續的維護來構建生態系統。
總體而言,構建和運行汽車操作系統需要三條方法論:Automotive OS這一軟件平臺能將復雜的ECU車輛網絡抽象簡化為單個設備,目的是分離軟件功能與車輛的生命周期,維護是其生存的關鍵:變量和版本管理支持通過可持續的維護來構建生態系統。
(以上內容根據Elektrobit合作伙伴管理亞洲區負責人顧淳于2022年8月3日由蓋世汽車、AUTOSAR組織聯合主辦的2022第三屆軟件定義汽車論壇暨AUTOSAR中國日發表的《汽車操作系統-未來汽車的創新驅動力》主題演講進行理解和整理。)
來源:蓋世汽車
作者:唐吉
本文地址:http://www.155ck.com/news/qiye/183870
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號