蓋世汽車訊 自動駕駛汽車(AV)因其在提高安全性、降低能耗和優化交通流量方面的巨大潛力而成為智能交通系統發展的關鍵環節。隨著自動駕駛汽車先進功能的增加,其運行階段的安全對于道路車輛行業至關重要。
然而,自動駕駛汽車已發生多起致命事故,凸顯了保障自動駕駛汽車安全的重要性和緊迫性。這些事故的原因可以歸結為自動駕駛汽車面臨的三個典型安全問題:功能安全、預期功能安全(SOTIF)和網絡安全。
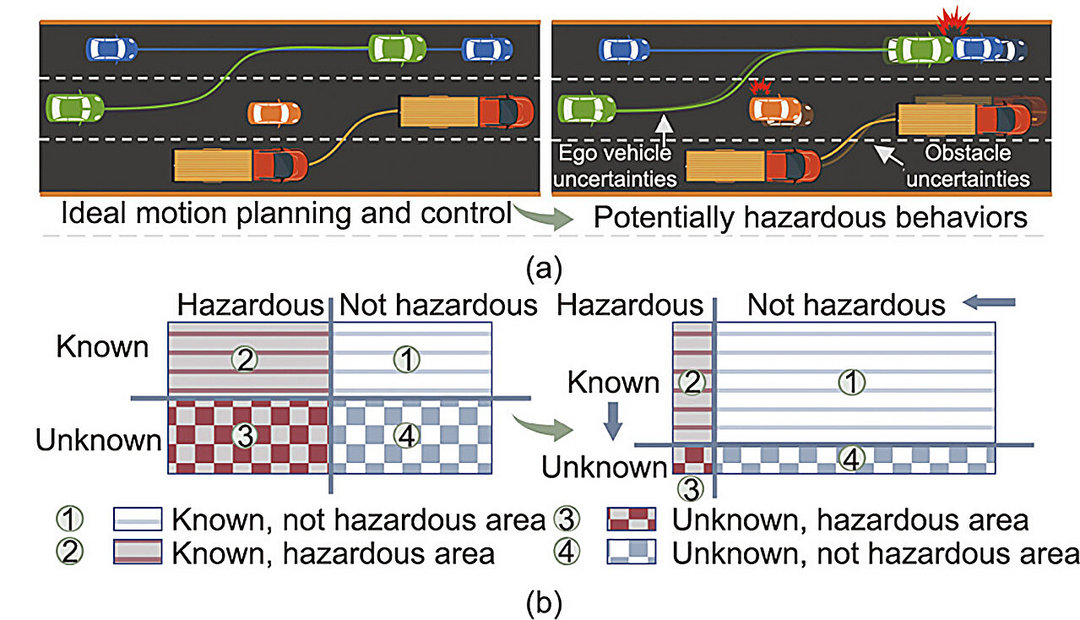
在這三個問題中,SOTIF既是當前的學術研究熱點,也是AV應用面臨的直接挑戰。SOTIF旨在處理潛在的危險行為,包括與規格、性能和態勢感知相關的不足或限制,無論是否存在合理可預見的誤用,以及周圍的影響(例如其他用戶、無源基礎設施、天氣和電磁干擾)。
據外媒報道,考慮到這一點,研究人員在期刊《Engineering》發表的題為“采用Zonotopic TRMPC的自動車輛的安全運動規劃和控制框架(Safe Motion Planning and Control Framework for Automated Vehicles with Zonotopic TRMPC)”的論文推斷,當前的運動規劃和控制技術也存在屬于SOTIF范圍的問題。例如,模型不匹配等不確定因素必然會導致未來的控制誤差,但規劃層并沒有考慮這些誤差在規劃周期內的影響。
圖片來源:期刊《Engineering》
本研究利用集合論、魯棒控制理論和可達性分析提出了安全運動規劃與控制(SMPAC)框架,旨在增強多維不確定性下自動駕駛的SOTIF。
為了實現SMPAC框架,論文作者們在自動駕駛的控制層和規劃層都采用了先進的方法。在控制層,研究人員利用集合論通過可達性分析來有效地分析控制循環內所有可能的不確定性。
在此分析的基礎上,研究人員開發出一種靈活高效的基于管的魯棒模型預測控制器(TRMPC),確保將所有可能的不確定性未來演化收斂到最小的魯棒正不變集。 同時,TRMPC保證控制誤差在一定范圍內的傳播被限制在一個緊湊集合內。
轉向規劃層,作者們引入了安全集的概念來描述自我車輛和障礙物的可到達的幾何邊界。安全集是根據從控制層誤差導出的有界緊集構造的。它們作為后續軌跡評估和選擇的基本結構。
綜上所述,控制層的zonotopic TRMPC和規劃層的安全集的深度集成確保了自動駕駛車輛的實際軌跡始終被限制在安全邊界內,從而增強了SOTIF。
在硬件在環實驗中,研究人員提供了兩種典型場景:極端操縱條件下的主動變道場景和正常操作條件下的防撞場景。這些實驗驗證了所提出的SMPAC框架的安全性、有效性和實時性。他們證明SMPAC可以減少自動駕駛中SOTIF類別內的潛在危險/未知區域。
作者鼓勵進一步的研究方向,包括:利用現代線性化方法對車輛系統進行建模,從而細化擾動集以減少SMPAC框架的保守性,并在SMPAC框架中嵌入最先進的運動規劃方法以進一步增強自動駕駛的能力。
來源:第一電動網
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/225321
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號