4月25日,商湯絕影面向量產(chǎn)的真·端到端自動駕駛解決方案UniAD(Unified Autonomous Driving)在北京車展上完成上車演示首秀。在2022年底提出行業(yè)首個感知決策一體化自動駕駛通用模型UniAD并榮獲2023年國際計算機視覺與模式識別會議(CVPR) 最佳論文后,商湯絕影率先實現(xiàn)中國端到端自動駕駛方案從技術(shù)創(chuàng)新到車端部署的關(guān)鍵突破。
真·端到端方案上車演示首秀,UniAD起步即城區(qū),暢行鄉(xiāng)村路
隨著智駕的落地場景從高速進入城區(qū),道路環(huán)境的復(fù)雜度急劇提高,對于傳統(tǒng)智駕方案來說,無保護左轉(zhuǎn)的城區(qū)復(fù)雜場景是不小的挑戰(zhàn),需要多傳感器融合感知且大量投入資源來解決各種長尾問題。
而UniAD實車部署后就開始學(xué)習(xí)如何在城區(qū)道路上行駛,如今,搭載UniAD端到端自動駕駛解決方案的車輛僅憑攝像頭的視覺感知,無需高精地圖,通過數(shù)據(jù)學(xué)習(xí)和驅(qū)動就可以像人一樣觀察并理解外部環(huán)境,然后基于足夠豐富的感知信息,UniAD能夠自己思考并作出決策,像人一樣開車,流暢進行無保護左轉(zhuǎn)、快速通行人車混行的紅綠燈路口,自主解決各種高難度的城市復(fù)雜駕駛場景。
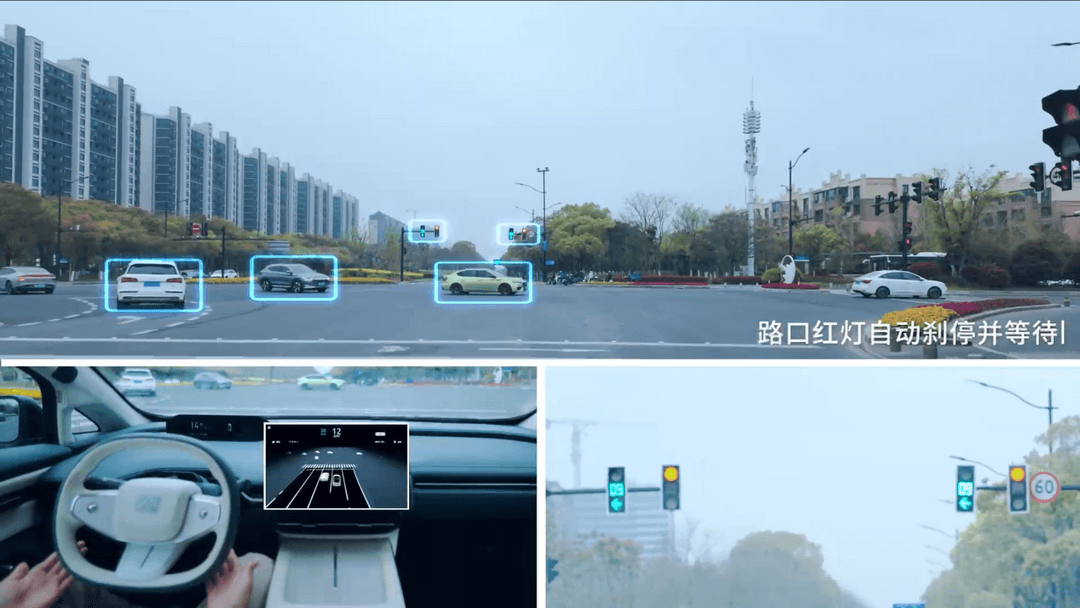
(搭載UniAD方案的車輛快速通行人車混行的紅綠燈路口)
不僅如此,在傳統(tǒng)方案較難突破的無中線的鄉(xiāng)村道路上,UniAD同樣可以自如行駛,完成包括大角度左轉(zhuǎn)上橋、避讓占道車輛及施工區(qū)域、繞行跑步行人等一系列高難度操作,真正做到“像人一樣開車”。
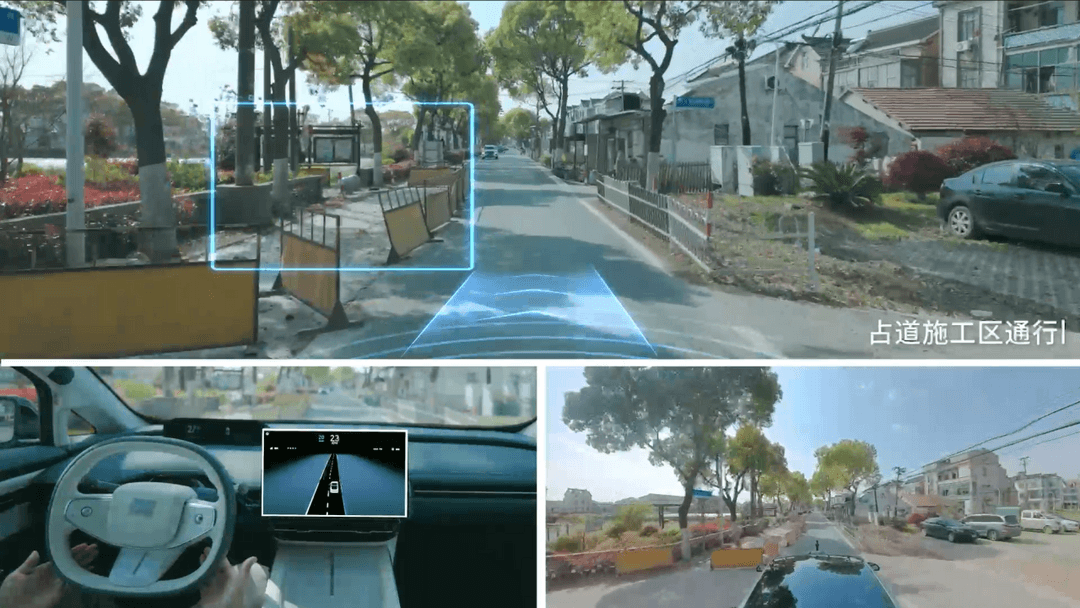
(搭載UniAD方案的車輛,可自主避讓施工區(qū)域)
在北京車展的上車演示中就有一個相當(dāng)復(fù)雜的場景:在臨港無標(biāo)線鄉(xiāng)村窄路上,對向有車駛來,前方有行人在跑步,UniAD判斷出前方有足夠的空間進行操作,所以在確保安全的情況下,選擇快速向左繞過行人然后回到正常行駛路線完成會車,順利解決這一復(fù)雜場景,就像老司機一樣在開車。
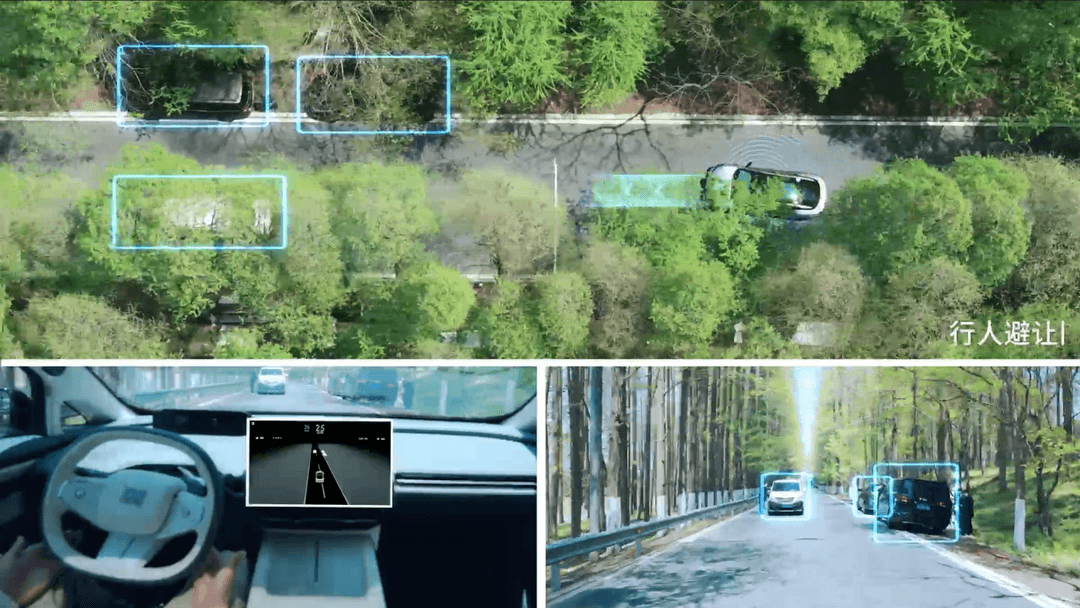
(UniAD靈活繞過行人并完成會車,真正做到像人一樣開車)
商湯絕影用令人驚艷的UniAD實車測試成果展現(xiàn)了中國面向量產(chǎn)的端到端智駕方案的實力。
UniAD真·端到端:感知決策一體大模型是最優(yōu)解
目前,自動駕駛算法的主流架構(gòu)方案是以工程師人為定義的手寫規(guī)則為基礎(chǔ),依靠感知、決策、規(guī)劃等不同模塊的相互配合來實現(xiàn)自動駕駛。但由于每個獨立模塊之間的數(shù)據(jù)是逐級傳遞的,必然會存在信息的丟失和誤差,而且前一個模塊的誤差會影響到下一個,多個模塊之間的信息誤差會不斷累積,進而影響到自動駕駛方案的整體效果。
而且有限的規(guī)則終究無法完全覆蓋無限的復(fù)雜場景和長尾問題,傳統(tǒng)智駕的天花板已經(jīng)開始顯現(xiàn)。
想要從感知開始就實現(xiàn)信息的無損傳遞并打破傳統(tǒng)智駕的天花板,必須要有一個全新的算法范式,而端到端模型正在為自動駕駛開辟出了一條全新的技術(shù)路線。
有別于傳統(tǒng)的智駕算法,端到端自動駕駛方案是指以最終的駕駛性能為目標(biāo),通過一種集成化的方式處理自動駕駛?cè)蝿?wù),從感知到?jīng)Q策再到控制的整個流程都依靠Transformer神經(jīng)網(wǎng)絡(luò)模型完成。
隨著UniAD的提出和特斯拉搭載FSD V12版本的實車上路,越來越多的公司也開始推出自己的“端到端”方案。
目前,市面上不少端到端方案是在感知和決策兩個模塊分別搭建一個大模型框架,更容易實現(xiàn)落地,但“兩段式”端到端方案的感知和決策兩個模型之間傳輸?shù)男畔⑹侨藶槎x的顯性信息,數(shù)據(jù)傳遞仍然會有過濾和丟失。
商湯絕影UniAD方案則是業(yè)界首個將感知、決策、規(guī)劃等模塊都整合到一個全棧Transformer端到端模型,實現(xiàn)感知決策一體化,不需要對感知數(shù)據(jù)進行抽象和逐級傳遞,“所見即所得”,將原始信息直接輸入到端到端模型中,然后以自車軌跡規(guī)劃為準(zhǔn)進行指令輸出,實現(xiàn)真·端到端自動駕駛。
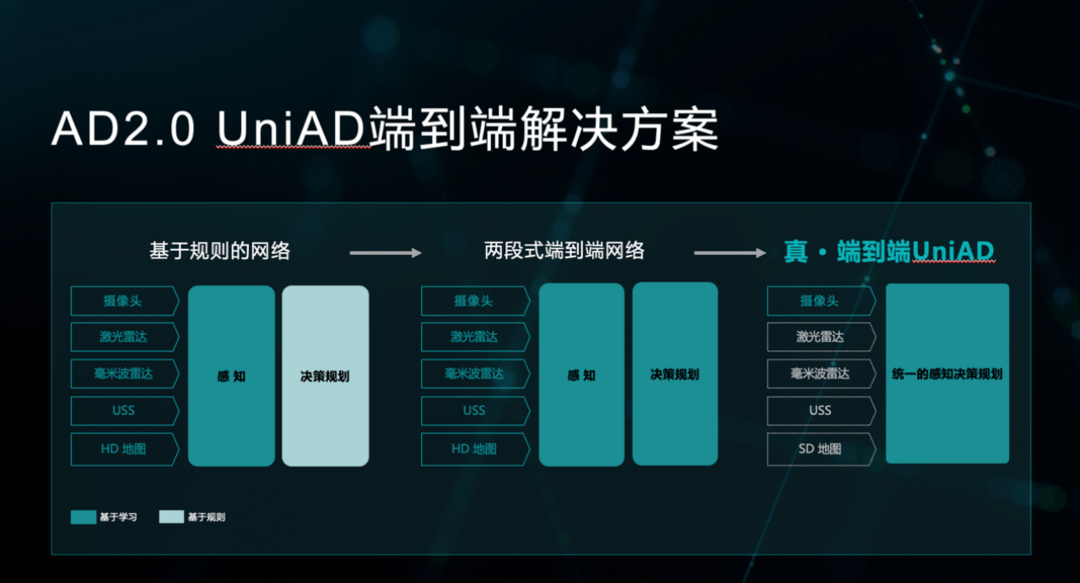
(真·端到端是感知決策一體化)
未來,端到端方案依靠持續(xù)算力投入和高質(zhì)量數(shù)據(jù)學(xué)習(xí)的高效范式將取代單純依靠人力堆砌、耗費時間的低效模式,成為自動駕駛在AGI時代的關(guān)鍵能力。
首先,傳統(tǒng)智駕方案和“兩段式”端到端方案都是依靠人為定義的規(guī)則在傳遞顯性信息,存在信息誤差和丟失,難以完整準(zhǔn)確還原外部場景,而端到端自動駕駛大模型最明顯的優(yōu)勢就在于信息的無損傳遞,端到端模型基于原始信息進行學(xué)習(xí)、思考和推理,最終能像人一樣綜合理解復(fù)雜的交通環(huán)境,并且能夠不斷成長,有著更高的能力上限。
其次,依賴數(shù)據(jù)驅(qū)動的端到端方案能夠?qū)⑵鋵W(xué)到的駕駛能力和技巧遷移泛化到其他場景當(dāng)中,具備更快的迭代效率,幫助車企更快速實現(xiàn)全國都能開的目標(biāo),無論是城區(qū)還是鄉(xiāng)村道路,現(xiàn)在的UniAD都行駛得游刃有余。
最后,端到端自動駕駛大模型是像人一樣感知和理解外部環(huán)境,純視覺和無高精地圖就是UniAD與生俱來的天賦,它只需要導(dǎo)航信息就可以把車駕駛到目的地,天然就能幫助車企降低軟硬件成本。
擁有更高能力上限、更快迭代效率、更低系統(tǒng)成本的感知決策一體大模型是真·端到端智駕的最優(yōu)解。
商湯絕影的真·硬核實力:強大模型性能、高質(zhì)量數(shù)據(jù)與豐沛算力
和基于規(guī)則的傳統(tǒng)智駕方案相比,端到端自動駕駛方案的核心優(yōu)勢是大模型強大的學(xué)習(xí)、思考和推理能力,特別是“涌現(xiàn)”能力,而UniAD端到端方案的能力展現(xiàn)需要強大的模型性能、高質(zhì)量數(shù)據(jù)和豐富的算力資源支撐。
在模型性能層面,商湯絕影在2022年底就提出了行業(yè)首個感知決策一體化自動駕駛通用模型,UniAD方案在高質(zhì)量數(shù)據(jù)的驅(qū)動下已經(jīng)歷多輪迭代,性能不斷優(yōu)化,處于行業(yè)領(lǐng)先地位。
特斯拉FSD V12版本刪除了30多萬行,最終縮減成幾千行,但這個端到端智駕方案的能力依然強大,并且在不斷成長。UniAD同樣如此,依靠商湯豐富的模型輕量化部署經(jīng)驗,2023年下半年開始商湯絕影UniAD方案就啟動部署上車,并且在豐沛算力和高質(zhì)量數(shù)據(jù)的支持下持續(xù)快速迭代和成長。
不止如此,特斯拉FSD V12等一體化端到端方案是基于一個不可解耦的模型打造,UniAD是將多個模塊整合到一個端到端模型架構(gòu)之下,仍可以對各個模塊進行分別的監(jiān)測和優(yōu)化,相較于純黑盒的端到端技術(shù),UniAD方案具有更強的可解釋性、安全性與持續(xù)迭代性。
在數(shù)據(jù)層面,端到端自動駕駛的訓(xùn)練需要高質(zhì)量視頻數(shù)據(jù),主要是各種長尾場景,如逆行車輛、橫穿的非機動車、“鬼探頭”的行人等,現(xiàn)實世界中的采集難度很大,現(xiàn)在很多企業(yè)雖然有很多數(shù)據(jù),但是大多是正常行車的低質(zhì)量數(shù)據(jù)。
商湯絕影通過實車采集、數(shù)據(jù)管線的清洗篩選能力以及強大的仿真技術(shù),可以通過添加障礙物等人為創(chuàng)造復(fù)雜場景,為UniAD提供持續(xù)進化和商業(yè)化落地的養(yǎng)分。
依靠世界模型,商湯絕影能夠源源不斷地生成自動駕駛環(huán)境下更為精細(xì)和復(fù)雜場景視頻數(shù)據(jù),然后用這些數(shù)據(jù)給UniAD進行有針對性的模型訓(xùn)練。比如,世界模型能夠生成人車混行、環(huán)島路口等復(fù)雜城市場景,甚至可以復(fù)刻“8D”城市構(gòu)造。

(商湯大裝置為UniAD的高效訓(xùn)練學(xué)習(xí)和實車部署提供堅實基礎(chǔ))
在算力層面,商湯從2018年開始布局建設(shè)AI基礎(chǔ)設(shè)施,如今,商湯大裝置已經(jīng)布局全國一體化的智算網(wǎng)絡(luò),總體算力規(guī)模達12,000 petaFLOPS(每秒千萬億次浮點運算次數(shù),下稱“P”)。憑商湯大裝置國內(nèi)領(lǐng)先的算力資源,UniAD自動駕駛方案的高效訓(xùn)練學(xué)習(xí)和實車部署具備堅實的基礎(chǔ)。
DriveAGI:更聰明更強大的端到端已在路上
商湯絕影在北京車展發(fā)布了更聰明更強大的下一代自動駕駛技術(shù)——DriveAGI的前瞻預(yù)覽,它是基于多模態(tài)大模型對端到端智駕方案進行改進和升級。
DriveAGI是自動駕駛大模型從數(shù)據(jù)驅(qū)動向認(rèn)知驅(qū)動進化,超越司機的概念,加深其對于世界的理解能力,具備更強的推理能力、決策能力以及交互能力,是目前自動駕駛中最貼近人類思維模式、最能理解人類意圖并有最強解決駕駛困難場景能力的技術(shù)方案,向著完全無人駕駛邁出重要一步。

(新一代自動駕駛大模型DriveAGI:可感知、可交互、可信賴)
不僅如此,DriveAGI是基于多模態(tài)大模型打造,具有強大的交互能力,讓用戶能用在座艙內(nèi)進行自然語言指令的交互和駕駛控制,在體驗上進一步做到可感知、可交互、可信賴。
從UniAD跨越到DriveAGI,商湯絕影一直在引領(lǐng)端到端自動駕駛的潮流,但我們不會止步于此。商湯絕影正在打破智能座艙和智能駕駛兩者的界限,推動艙駕一體的架構(gòu)變革,加速智能汽車駛?cè)階GI全新未來。
來源:第一電動網(wǎng)
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/228789
以上內(nèi)容轉(zhuǎn)載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動網(wǎng)(www.155ck.com)立場。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號