蓋世汽車訊 隨著人工智能的快速發(fā)展,自動駕駛、具身智能等無人系統(tǒng)不斷在現(xiàn)實場景中得到推廣和應(yīng)用。作為獲取信息的核心手段,視覺感知在這些智能系統(tǒng)中發(fā)揮著十分重要的作用。然而,如何在動態(tài)、多樣化和不可預(yù)測的環(huán)境中實現(xiàn)高效、精準和穩(wěn)健的視覺感知,仍是有待解決的難題。
(圖片來源:清華大學(xué))
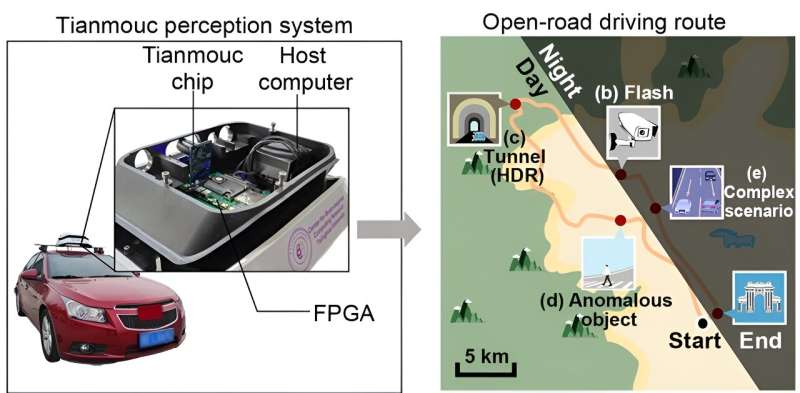
在開放世界場景中,智能系統(tǒng)不僅要處理大量數(shù)據(jù),還要應(yīng)對各種極端事件,如突發(fā)危險、隧道入口處劇烈的燈光變化,以及夜間駕駛場景中強烈的閃光干擾等。傳統(tǒng)的視覺感知芯片受到“功耗墻”和“帶寬墻”的限制,在處理這些場景時經(jīng)常面臨失真、故障或高延遲的問題,嚴重影響了系統(tǒng)的穩(wěn)定性和安全性。
來源:第一電動網(wǎng)
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/233568
以上內(nèi)容轉(zhuǎn)載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動網(wǎng)(www.155ck.com)立場。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號