蓋世汽車訊 據外媒報道,美國賓夕法尼亞州立大學工程學院(Penn Engineering)的學生們推出一款全尺寸電動自動駕駛卡丁車——AV4EV。該車不僅支持多種靈活的傳感和計算功能,還能夠搭載一名人類駕駛員以收集額外的數據。
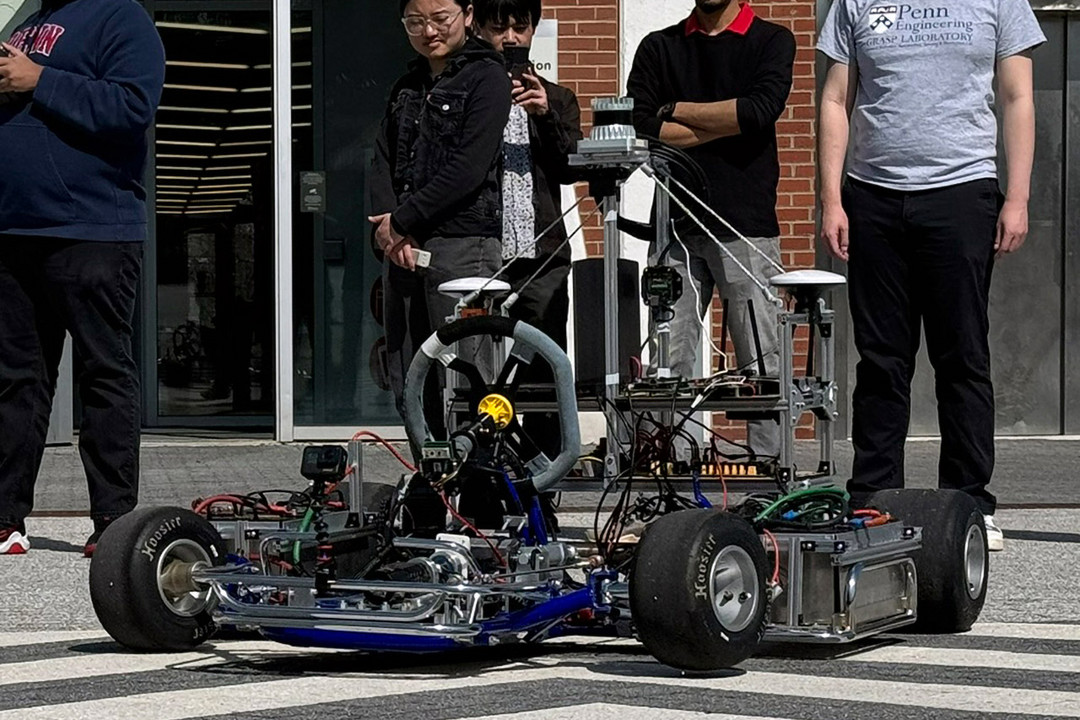
自動駕駛卡丁車AV4EV(圖片來源:賓夕法尼亞州立大學工程學院)
背景
隨著人們對感知、定位、規劃、控制和預測等自動駕駛相關模塊進行了廣泛研究,深度學習(DL)和模仿學習(IL)等人機協同端到端(human-in-the-loop end-to- end)方法對于實現安全關鍵操作方面仍存在尚未解決的挑戰。一方面,模塊化算法設計的問題在于系統中的每個單獨模塊可能并不知道所需的“高層次”任務,從而導致信息遺漏和協調不足。而端到端法會將自動駕駛系統視為一個整體,直接將原始傳感器的輸入信息映射為控制端(油門、轉向、制動)輸出信息。此種方法不僅在賽車領域具有優勢,還可以擴展至有意義的實際道路應用中。
來源:第一電動網
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/241490
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號