蓋世汽車訊 機器人技術(shù)的進步離不開研究,而研究又在很大程度上依賴于有效的平臺來測試機器人控制和導航的算法。盡管科學家們在過去幾十年里已經(jīng)開發(fā)了許多機器人平臺,但其中大多數(shù)都存在缺陷,從而限制了它們在研究環(huán)境中的使用。
據(jù)外媒報道,加州大學伯克利分校(University of California,Berkeley)的研究人員最近開發(fā)出一種新型機器人平臺——伯克利人形機器人(Berkeley Humanoid),可用于訓練和測試人形機器人的控制算法。相關(guān)研究成果已發(fā)表在arXiv預印本服務器上,據(jù)論文介紹,這種新型人形機器人能夠解決并克服以前機器人研究平臺的一些局限性。
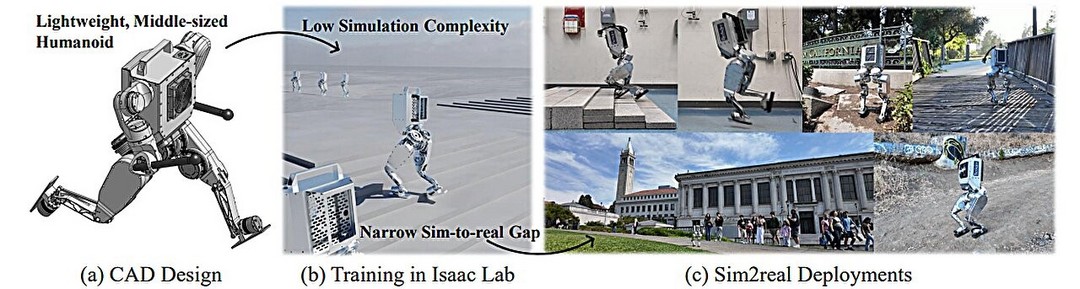
圖片來源:arXiv
來源:第一電動網(wǎng)
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/243320
以上內(nèi)容轉(zhuǎn)載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動網(wǎng)(www.155ck.com)立場。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。



先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!


 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號