高精地圖和定位一直是自動(dòng)駕駛的難點(diǎn)。用傳統(tǒng)激光雷達(dá)收集地圖的方式,不單單傳感器成本高,并且數(shù)據(jù)量龐大,很難實(shí)現(xiàn)地圖的實(shí)時(shí)更新。
從 2017 年開(kāi)始,業(yè)內(nèi)陸續(xù)出現(xiàn)了一些基于低成本傳感器的眾包地圖方案,其中包括:
1.Mobileye 的 REM(Rod Experience Mngement):眾包地圖概念的先驅(qū),基于前視攝像頭方案,捕捉道路上的車(chē)道線(xiàn)、交通標(biāo)識(shí)等重要信息上傳到云端,通過(guò)多車(chē)眾包形成可更新的圖層,從而輔助傳統(tǒng)高精度地圖定位。
2. 博世的 Bosch Rod Signture 以及大陸的 E-Horizon:概念與 REM 類(lèi)似,但是在傳感器端加入了毫米波雷達(dá)。
去年 CES,國(guó)內(nèi)的邊緣計(jì)算公司地平線(xiàn)向 GeekCr 展示了基于其「征程」第二代芯片架構(gòu)的自動(dòng)駕駛計(jì)算平臺(tái) Mtrix(這個(gè)平臺(tái)今年獲得了 CES 2019 的創(chuàng)新獎(jiǎng))。

當(dāng)時(shí)他們就向我們透露,也會(huì)基于「征程」二代芯片架構(gòu)做自己的眾包地圖方案,今年的 CES,他們兌現(xiàn)了這個(gè)承諾,正式發(fā)布了 NvNet。
地平線(xiàn)官方將 NvNet 稱(chēng)為「眾包高精地圖采集與定位平臺(tái)」。它所采集的數(shù)據(jù)效果如下圖。
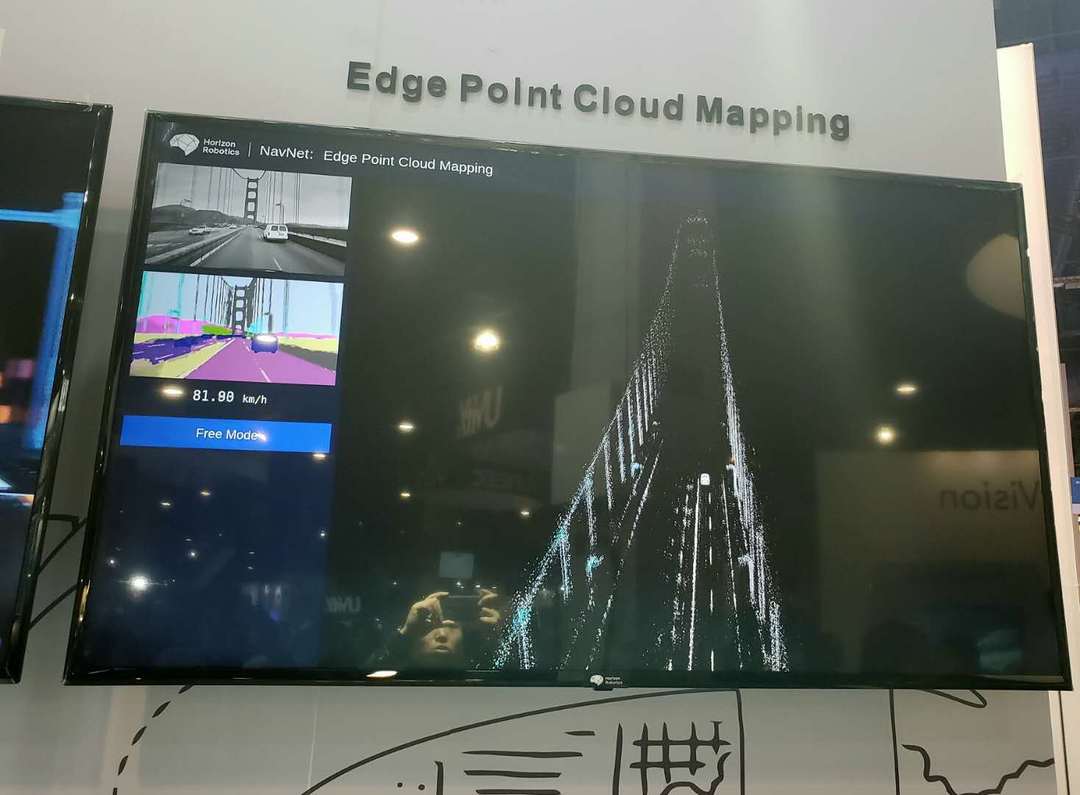
當(dāng)?shù)谝淮慰吹叫Ч麍D時(shí),你可能會(huì)產(chǎn)生一個(gè)錯(cuò)覺(jué):「這不是激光雷達(dá)所產(chǎn)生的點(diǎn)云圖嗎?怎么感覺(jué)密度有些稀疏?」
事實(shí)上 NvNet 與 REM 一樣,也是僅僅依靠一個(gè)單目攝像頭來(lái)收集數(shù)據(jù)的,只不過(guò)他們依靠自己的視覺(jué)算法計(jì)算出了各個(gè)像素點(diǎn)的距離。其具體原理可以概括為:
相較于 Mobileye REM 之前展示的 2D 效果圖,地平線(xiàn) NvNet 給出的 3D 點(diǎn)云圖明顯有著更高的信息密度。因?yàn)槭褂脝文繑z像頭,地平線(xiàn)的 NvNet 系統(tǒng)的成本和維護(hù)費(fèi)用會(huì)遠(yuǎn)低于現(xiàn)有的激光雷達(dá)方案,在量產(chǎn)上有更大的優(yōu)勢(shì),形成大規(guī)模眾包地圖的采集和更新能力。
在 CES 的展館外,我體驗(yàn)了地平線(xiàn)搭載 NvNet 方案的測(cè)試實(shí)車(chē)——一輛奧迪 Q7。

在車(chē)頂上地平線(xiàn)加裝了一個(gè)單目攝像頭,橫縱向視角分別為 90 度和 50 度。攝像頭通過(guò)一根鏈接線(xiàn)接入車(chē)內(nèi)的芯片系統(tǒng)板。

我坐在車(chē)內(nèi)后排,手中通過(guò)他們提供的一臺(tái)平臺(tái)電腦來(lái)查看 NvNet 實(shí)時(shí)生成的點(diǎn)云圖。下面是演示過(guò)程中,平板電腦上的效果視頻:
可以看到,NvNet 在實(shí)際道路上生成的實(shí)時(shí)點(diǎn)云圖還是很穩(wěn)定的,道路旁的標(biāo)志物(白色)樹(shù)木(綠色)以及馬路邊緣(紫色)等都通過(guò)點(diǎn)云圖顯示了出來(lái)。甚至當(dāng)我們路過(guò)一個(gè)大型停車(chē)樓時(shí),NvNet 也把它清晰的標(biāo)注了出來(lái)。(上面視頻中 2 分 20 秒處)
地平線(xiàn)的余軼南博士告訴我,由于 NvNet 捕捉的地圖信息密度高于一般的眾包方案,他們通過(guò) SLAM 技術(shù),利用單目攝像頭的感知再結(jié)合從車(chē)輛本身的部分信息,就可以實(shí)現(xiàn)車(chē)輛在 NvNet 地圖中的定位。
現(xiàn)今的高精地圖領(lǐng)域可謂是商業(yè)結(jié)構(gòu)非常復(fù)雜,除了傳統(tǒng)的圖商之外,主機(jī)廠、Tier1、芯片供應(yīng)商以及算法公司等等都有所涉及。
在自動(dòng)駕駛領(lǐng)域,地平線(xiàn)定位于 Tier2,提供核心芯片和算法方案。在 NvNet 的落地上,余軼南透露地平線(xiàn)會(huì)和圖商以及車(chē)輛運(yùn)營(yíng)企業(yè)合作,通過(guò)眾包方案進(jìn)行地圖數(shù)據(jù)的采集工作,并通過(guò)局部地圖和云端地圖的比較,將地圖差異上傳到云端,對(duì)云端的全局地圖進(jìn)行更新。此外,地平線(xiàn)計(jì)劃在前裝的 ADAS 系統(tǒng)上整合 NvNet 系統(tǒng),并提供數(shù)據(jù)給需要地圖數(shù)據(jù)的客戶(hù),地平線(xiàn)本身不涉及運(yùn)營(yíng)和數(shù)據(jù)業(yè)務(wù)。
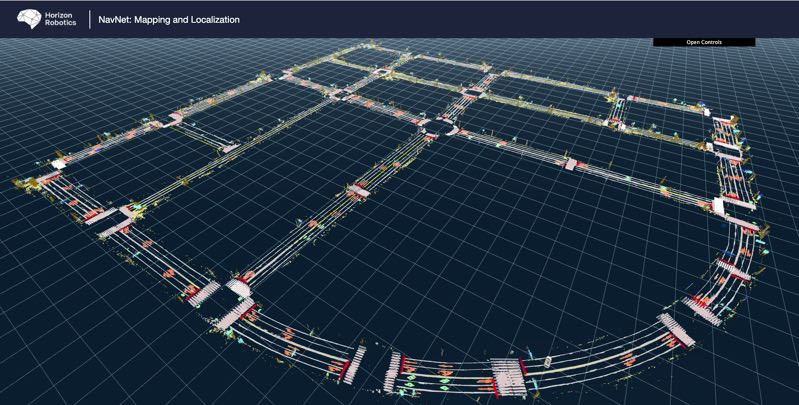
視客戶(hù)的不同需求,地平線(xiàn)還可以將 NvNet 的原始點(diǎn)云數(shù)據(jù)做進(jìn)一步的結(jié)構(gòu)化處理,形成 2D 的道路環(huán)境圖層,這樣更便于輔助傳統(tǒng)的高精度地圖。下圖便是 NvNet 在中關(guān)村收集的數(shù)據(jù)在結(jié)構(gòu)化之后產(chǎn)出的效果圖。
對(duì)于地平線(xiàn)這樣的 Tier2 來(lái)說(shuō),推出眾包地圖方案可以說(shuō)是出于發(fā)展戰(zhàn)略的一種必然選擇。因?yàn)樗瓤梢哉故咀陨硇酒?算法的感知處理能力,同時(shí)也拓展了在自動(dòng)駕駛行業(yè)中的落地領(lǐng)域。不過(guò),所有基于眾包概念的方案,都要依賴(lài)龐大的裝車(chē)量來(lái)提供效果,這就意味著地平線(xiàn)必將以進(jìn)入前裝市場(chǎng)作為最終目標(biāo)。
此次在 CES 見(jiàn)到地平線(xiàn)的 CEO 余凱博士時(shí),他對(duì)我說(shuō)了一句意味深長(zhǎng)的話(huà):「做前裝是一件困難、復(fù)雜且研發(fā)周期很長(zhǎng)的事,我們一定要耐得住寂寞,不去跟所謂的熱點(diǎn)。」相信這句話(huà)也會(huì)幫助他們走得更遠(yuǎn)。
原創(chuàng)聲明: 本文為 GeekCr 原創(chuàng)作品,歡迎轉(zhuǎn)載。轉(zhuǎn)載時(shí)請(qǐng)?jiān)谖恼麻_(kāi)頭注明作者和「來(lái)源自 GeekCr」,并附上原文鏈接,不得修改原文內(nèi)容,謝謝合作!
歡迎關(guān)注 GeekCr 微信公眾號(hào):?GeekCr 極客汽車(chē)(微信號(hào):GeekCr)∓ 極市(微信號(hào):geeket)。
來(lái)源:geekcar
本文地址:http://www.155ck.com/news/shichang/85925
以上內(nèi)容轉(zhuǎn)載自geekcar,目的在于傳播更多信息,如有侵僅請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動(dòng)網(wǎng)(www.155ck.com)立場(chǎng)。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買(mǎi)車(chē),買(mǎi)的放心開(kāi)的安心
您的詢(xún)價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!

 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)