蓋世汽車訊 近年來,機器人專家開發了各種各樣的系統,旨在解決不同的現實世界任務,如完成家務、遞送包裹,或在指定環境中尋找目標物體。該領域的一個關鍵目標是,開發算法以支持在具有不同體型和特征的機器人之間可靠地轉移特定技能。這將有助于快速訓練機器人完成新任務,從而拓展其能力。
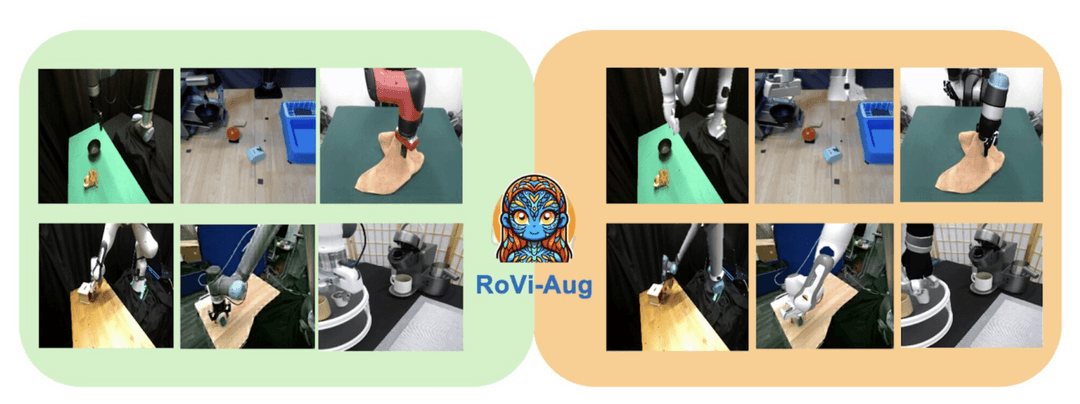
據外媒報道,加州大學伯克利分校(UC Berkeley)的研究人員開發出RoVi-Aug。這是一種新的計算框架,旨在增強機器人數據并促進不同機器人之間實現技能轉移。該研究發表在預印本服務器arXiv上。該方法利用先進的生成模型來增強圖像數據,并為不同的機器人創建具有不同攝像視圖的合成視覺任務演示。
研究人員表示,“當代機器學習系統成果表現出卓越的泛化能力,特別是生成模型,并激勵研究人員探索如何在機器人技術中實現類似的泛化能力。自今年年初以來,我們一直在研究跨視點和跨機器人泛化的問題。”
在之前進行研究時,研究人員發現了在不同機器人之間進行學習泛化的一些挑戰。具體來說,他們發現當機器人數據集中包含的場景分布不均勻時,例如其中特定機器人視覺效果和攝像角度占主導地位,這使得它們在向不同機器人教授相同技能時效果較差。
有趣的是,研究人員發現,許多現有機器人訓練數據集具有不平衡性,包括一些最完善的數據集。例如,即使是Open-X Embodiment數據集(OXE,一個廣泛用于訓練機器人算法的數據集,其中包含不同機器人完成不同任務的演示),其中一些機器人的數據也更多,例如Franka和xArm機械手。
數據集的這種偏差,使機器人策略模型傾向于過度擬合特定的機器人類型和視點。研究人員表示:“為了緩解這一問題,2024年2月,我們提出了一種測試時間適應算法Mirage。該算法通過交叉繪制(cross-painting),在訓練期間將看不見的目標機器人轉化為能看見的源機器人,從而創建源機器人在測試時執行任務的假象。”
來源:第一電動網
作者:蓋世汽車
本文地址:http://www.155ck.com/news/shichang/250492
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(www.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號